I - GENERALITES
|
La locomotive BB15000, outre la possibilité d'offrir une puissance de traction de 4500 kw à sa vitesse maximale de 180 km/h
(figure 16), devait être munie également de freinage électrique permettant d'assurer :
- l'effort de maintient du train dans les pentes
- l'effort de freinage propre de la locomotive dans tous les cas de
freinage de service ou d'urgence en lui assurant, dans ce dernier cas, un coefficient de poids-frein minimal de 1,25.
Dans ces conditions, les roues ne sont pratiquement jamais sollicité par les contraintes thermiques du classique freinage
par sabots, ce qui constitue un avantage très important.
Enfin, il convenait de mettre en oeuvre les possibilités offertes par les semi-conducteurs au silicium (diodes et thyristors)
pour les diverses fonctions : réglage de tension - réglage de champ inducteur, freinage.
Ce sont ces divers impératifs qui ont guidé le choix du schéma de la locomotive.
Traction
Rappelons briévement qu'il existe deux montages pour le réglage de la tension par pont à redresseurs contrôlés. L'un,
dit à réglage symétrique ou pont complet, comporte 4 bras de thyristors. L'autre, dit à réglage asymétrique ou pont mixte,
comprend seulement 2 bras de thyristors (figure 17).
Le réglage de tension par pont mixte est évidemment le plus économique, mais il présente l'inconvenient de ne pas permettre le freinage
par récupération. Ce système de freinage qui n'est possible qu'à condition d'utiliser un pont complet, est fort intéressant car il
évite l'installation d'un encombrant rhéostat dont il est toujours fort difficile d'évacuer les calories.
|
 |
 |
 |
Malheureusement, le réglage de tension par thyristors engendre des formes de courant secondaire qui s'écartent notablement de la
sinusoïde idéale. On retrouve seulement la forme de l'intensité de la classique locomotive à redresseurs lorsque le réglage est terminé
(fonctionnement à pleine ouverture ou pleine onde).
Pendant la période de réglage de tension, le courant primaire (image du courant secondaire) contient donc un taux élevé d'harmoniques
impairs qui déforment la tension de ligne et peuvent, dans certains cas, perturber certains types de circuits de signalisation.
Par ailleurs, le facteur de puissance de l'engin de traction est lié essentiellement à la valeur de l'angle de déblocage
des thyristors. Il peut, en toute première approximation, s'exprimer par :
 | dans le cas de réglage en pont complet |
 | dans le cas d'un pont mixte |
 |
On voit, dès lors, tout l'intérêt que présente la réduction de la valeur de l'intensité primaire perturbée au cours du réglage
de tension par thyristor.
Le schéma représenté à la figure 18 permet d'obtenir ce résultat. Compte tenu du rapport de transformation,
l'intensité perturbée, appelée en ligne lors du déblocage du premier pont, est faible et les harmoniques engendrés sont
eux aussi de faible valeur. Quant au facteur de puissance, il atteint, à la fin du déblocage du 1er pont, sa valeur
maximale.
On notera que toute l'intensité emprunte les bras à diodes des autres ponts.
Au cours du déblocage du 2ème pont, l'intensité est la somme de deux termes, et la composante perturbée
a la même valeur que précédemment.
Il en est évidemment de même au cours des déblocages du 3ème puis du 4ème secondaire.
L'intensité perturbée étant d'autant plus faible que le nombre de secondaires est important, il y aurait intérêt à
augmenter le nombre de secondaires. Mais cette disposition conduit à une complication notable dans la construction du
transformateur principal, avec multiplication du nombre de bornes.
|
Finalement, pour la locomotive BB15000, nous avons adopté un schéma à 2 ponts contrôlés, par moteur, solution de compromis
permettant d'une part, une construction simple du transformateur principal, tout en assurant des valeurs de facteur de puissance
acceptables (figure 20).
Chaque moteur possède sa propre alimentation. Cette disposition permet d'éviter les inconvenients présentés
par le schéma à deux moteurs en parallèle, en particulier élimination du risque de flash d'inversion sur le moteur de traction
en cas de défaut sur l'autre.
En outre, l'indépendance dans la commande de chaque demi-machine constitue un important avantage dans la mise en oeuvre
de l'antipatinage dont le fonctionnement sera exposé par la suite.
En cas d'incident sur un équipement, on dispose encore d'une demi-locomotive de puissance notable (2250 kW).
|
 |
Freinage
Pour assurer les performances de freinage indiquées précédemment, il faut exercer un effort de freinage moyen de 7,5 tonnes
environ, valeur acceptable puisqu'elle conduit à un coefficient d'adhérence inférieur à 10%, chiffre qu'il est prudent de ne
pas dépasser si l'on veut éviter les enrayages en cours de freinage.
Les ponts complets à thyristors pouvant fonctionner en onduleur, permettant d'assurer, sans supplément d'appareillage
notable, le freinage par récupération.
Aussi, avons nous adopté pour le 1er pont un réglage "tout thyristor".
Le deuxième pont (pont mixte) sera utilisé pour assurer, au cours du freinage, l'excitation séparée des moteurs de traction.
Les performances d'un tel mode de freinage (fig21) sont très supérieures à celles exigées (7,5 t d'effort moyen), et il
serait possible, toujours sous réserve d'une bonne adhérence, d'exercer des efforts atteignant 12 tonnes.
Valeur qui peut être maintenu jusqu'à l'arrêt complet.
A côté de ces remarquables qualités, le freinage par récupération présente toutefois, sous l'aspect sécurité, le défaut
d'exiger pour son fonctionnement, la présence de tension en ligne (2).
Nous avons donc été conduits à prévoir un système complémentaire de freinage électrique, indépendant de la caténaire, dont
l'effort ajouté à une certaine valeur de l'effort de freinage pneumatique, permet d'assurer à la locomotive un pourcentage
de poids-frein de 1,25.
Ce freinage électrique complémentaire a été obtenu de façon simple, sous forme d'un freinage rhéostatique de secours
réutilisant, à cet effet, les résistances de stabilisation dont le dimensionnement a été légèrement augmenté. L'excitation séparée
des moteurs de traction est alors fournie par une petite batterie d'accumulateurs. Les deux niveaux de réglage de l'excitation
permettent d'obtenir la caractéristique effort/vitesse (fig22) sur laquelle apparaît la valeur de l'effort de freinage
pneumatique qu'il convient de superposer au freinage rhéostatique de secours.
De l'ensemble de ces dispositions, il résulte que les roues de la locomotive ne subissent les effets du freinage pneumatique
que dans les seuls cas d'évolution ou de freinage d'urgence (dépression dans la conduite générale supérieure à 2 bars)
avec disparition du freinage par récupération (disparition de la tension de ligne, disjonction de la locomotive, etc.)
Le temps de mise en oeuvre de ces modes de freinage ou la substitution du freinage rhéostatique de secours au freinage par
récupération est très rapide (de l'ordre de la seconde).
II - LE SCHEMA DE PUISSANCE DE LA LOCOMOTIVE BB15000
Pour répondre aux divers impératifs indiqués dans les remarques préliminaires, le schéma de puissance a été établi ainsi
que l'indique la figure 24.

Le courant capté par un pantographe (PT) alimente le primaire du transformateur principal par l'intermédiaire d'un disjoncteur
25 kV à soufflage pneumatique (DJ). Un sectionneur à commande manuelle (HOM) permet la mise à la terre de la ligne de toiture
et celle de la borne d'entrée du transformateur principal, assurant ainsi la sécurité du personnel lors d'interventions sur les
circuits de puissance de la locomotive.
Pendant les périodes où les redresseurs principaux sont inutilisés (arrêt, marche sur l'erre), il est souhaitable d'éviter
de les contraindre par les surtensions pouvant provenir de la ligne. Aussi, les isole-t-on alors des secondaires du transformateur
principal par les contacteurs L(M)11 et L(M)12, L(M)21 et L(M)22.
Schéma de traction
Figures 25a, 25b. Ces schémas donnent en trait rouge, les circuits obtenus dans les divers cas suivants :
- Réglage de la tension moteur, jusqu'à la demi-tension

Le réglage de l'angle d'allumage de 90° à 0 des ponts complets permet d'obtenir cette variation de tension. Sur le figure 25a, on voit
que les thyristors du pont mixte n'étant pas utilisés, les secondaires (a5-a7) et (a6-a8) ne sont pas intéressés et le courant emprunte
le circuit constitué par les bras de diodes de ce pont, ces derniers doivent donc être dimensionnés pour conduire en permanence
le courant de démarrage. Les courbes de la figure 25a montrent l'évolution de la tension redressée et celle de la tension
moyenne aux bornes du moteur de traction au cours de la variation de l'angle d'allumage des thyristors des ponts complets.
- Réglage de la tension moteur entre la demi-tension et la pleine tension

Les ponts complets étant maintenus à pleine ouverture, on procède au réglage de 180° à 0° de l'angle d'allumage des ponts
mixtes. Les courbes de la figure montre l'évolution de la tension redressée et celle de la tension aux bornes des moteurs de
traction au cours de la variation de l'angle d'allumage.
- Shuntage

Les ponts thyristors (complet et mixte) étant maintenu à pleine ouverture, le shuntage est obtenu par décalage de l'impulsion
d'allumage des thyristors de shuntage. Ce procédé permet ainsi de dériver, à point nommé, hors de l'inducteur, l'intensité
traversant l'induit. Le taux de shuntage ainsi obtenu sera donc, en première approximation, le rapport de l'intensité moyenne
dérivée hors de l'inducteur à la valeur moyenne du courant traversant l'induit. En toute première approximation,
( étant l'angle de conduction des thyristors de shuntage), on peut calculer la valeur moyenne
i de l'intensité dérivée hors de l'inducteur : étant l'angle de conduction des thyristors de shuntage), on peut calculer la valeur moyenne
i de l'intensité dérivée hors de l'inducteur :
 et le taux de shuntage aura pour valeur approchée :
et le taux de shuntage aura pour valeur approchée :
 Il convient de noter que, en raison de la présence de la résistance de shuntage permanent, le flux des inducteurs des moteurs de
traction varie peu. En effet, lors de la conduction des thyristors de shuntage, la résistance de shuntage permanent permet
alors l'écoulement du courant produit par la tension de self des inducteurs.
Il convient de noter que, en raison de la présence de la résistance de shuntage permanent, le flux des inducteurs des moteurs de
traction varie peu. En effet, lors de la conduction des thyristors de shuntage, la résistance de shuntage permanent permet
alors l'écoulement du courant produit par la tension de self des inducteurs.
En définitive, dans la marche en traction, la totalité du plan effort / vitesse est balayée par les réglages successifs
des ponts complets, des ponts mixtes puis enfin des thyristors de shuntage.
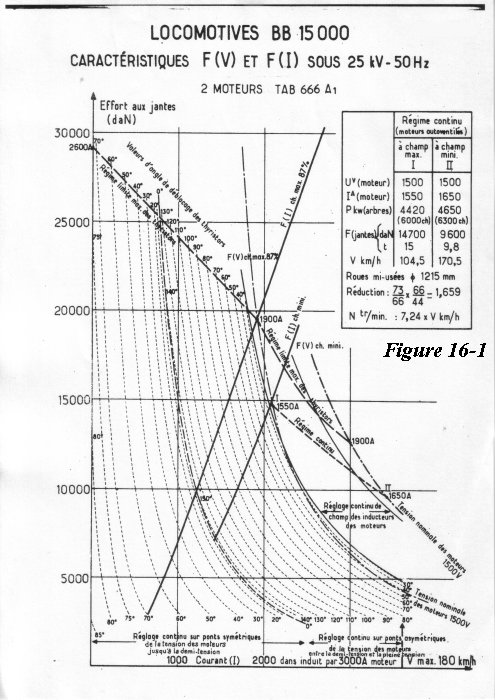
Caractéristiques effort / vitesse en traction
Elles sont données à la figure 16 vue au début de cette page. Un certain nombre d'angles d'ouverture sont repérés sur les
courbes en pointillés, mais le réglage est absolument continu et tous les points du plan effort / vitesse sont utilisables. On
notera la loi de limitation d'intensité qui a été fixée. Elle permet de "suivre" sensiblement la courbe d'adhérence tout en
autorisant un gain sur le nombre de thyristors du pont mixte (voir paragraphe "redresseurs").
Schéma de freinage par récupération

Ce schéma donne, en trait fort, le circuit réalisé pour la marche en freinage par récupération.
Chaque induit fonctionnant alors en génératrice à excitation séparée, est connecté aux bornes du pont complet correspondant par l'intermédiaire
d'une résistance dite de "stabilisation" qui remplit alors un double rôle (Nous verrons par la suite, que grâce à un
surdimensionnement de cette résistance, on peut en outre fonctionner dans certains cas en freinage rhéostatique pur,
à excitation séparée indépendante de la caténaire.) :
- limitation de l'écart entre les intensités débitées par les deux moteurs en raison des différences entre leurs forces électromotrices
(différences de caractéristiques, différences de diamètre de roue).
- limitation des intensités de défaut qui peuvent apparaître en cas de disparition de la tension ligne (court-circuit sur le
transformateur), ou en cas de défaut de la commande de gachette. Dans ce cas en effet la tension alternative du transformateur
vient s'ajouter à la tension continue du générateur et les crêtes d'intensité fortement ondulées (Ce défaut est habituellement
désigné sous le nom de reconduction.) qui en résultent, ne sont alors limitées que par la résistance du circuit.
Le schéma de la figure 26 fait également apparaître le circuit d'alimentation des inducteurs. A cet effet, l'un des ponts mixtes
est utilisé pour le réglage de l'intensité d'excitation. Compte tenu de la faible valeur de la tension nécessaire à
cette alimentation, il a été nécessaire d'utiliser une prise spéciale sur le secondaire du transformateur principal.
Dans le fonctionnement en freinage par récupération, on dispose de deux paramètres pour balayer la totalité du plan
effort / vitesse.
1) Réglage de l'intensité d'excitation séparée des inducteurs des moteurs de traction (par décalage des impulsions d'allumage
du pont mixte de 180° à 0°).
La tension du pont fonctionnant en onduleur est alors maintenue à une valeur courante déterminée par l'angle de garde que
l'on a fixé à 33° environ dans le cas présent.
2) Réglage de la tension de l'onduleur, l'intensité d'excitation étant maintenue à une valeur constante (810 A). Le réglage
de la tension du pont onduleur est obtenu par décalage de l'angle d'allumage de -33° (angle de garde) à -180°.
Les courbes de
la figure 26 montrent l'évolution de la valeur moyenne de l'onduleur au cours de ce réglage qui passe successivement de valeurs
négatives à une valeur puis nulle puis à des valeurs positives.
L'ensemble transformateur redresseurs, qui était récepteur pour des angles de décalage compris entre -33° et -90°, devient
ensuite générateur de -90° à -180°.
Compte obtenu des signes adoptés sur les courbes précédentes, la figure 27 montre les variations de la force électromotrice (E)
du moteur en fonction de la vitesse.
La relation suivante relie, en valeur absolue, la force électromotrice, la tension du transformateur redresseur et l'intensité
dans l'induit :
U = E - RI
R étant la résistance de stabilisation.
On voit alors sur la figure 27, la courbe de variation que doit suivre la tension du groupe transformateur redresseur pour
obtenir une intensité constante I dans le circuit des induits des moteurs de traction. Dans la zone 1 de la figure 27, la
tension du groupe onduleur est maintenue constante et la force électromotrice de l'induit est ajustée à la valeur convenable
par réglage de l'intensité d'excitation. Dans la zone 2, l'intensité d'excitation est maintenue constante et la tension
du groupe transformateur redresseur est réglée à des valeurs successivement négatives, nulles, et positives.
Caractéristiques effort / vitesse en freinage par récupération
La figure 28 donne les caractéristiques "effort / vitesse" dans le mode de fonctionnement en freinage par récupération. Ici
encore, quelques courbes tracées en pointillé font apparaître certaines valeurs de réglage, mais la commande est absolument
continue, tous les points de réglage sont utilisables. On notera également sur cette figure les limites que l'on s'est
fixées, pour l'intensité d'excitation et pour l'intensité d'induit, afin de ne pas dépasser un effort de retenue de 9,5 t.
Schéma de freinage rhéostatique
La figure 29 fait apparaître le schéma réalisé pour le fonctionnement en freinage rhéostatique. On voit que le circuit de
chaque induit se trouve fermé sur la résistance de stabilisation correspondante. L'excitation séparée des inducteurs des moteurs
de traction est fournie par une batterie d'accumulateurs. Ce mode de freinage se trouve ainsi rendu indépendant de la caténaire.
Un contacteur d'excitation supplémentaire CEX3, dont on provoque automatiquement la fermeture à la moitié de la vitesse
maximale, permet d'obtenir un deuxième niveau d'excitation.
Ce mode de freinage n'est mis en service que de façon tout à fait exceptionnelle dans le seul cas de manque d'effort de
freinage par récupération au cours de freinage d'urgence (Dépression supérieure à 2 bars dans la conduite générale).
Pour obtenir l'effort nécessaire, il faut ajouter un certain effort de freinage pneumatique.
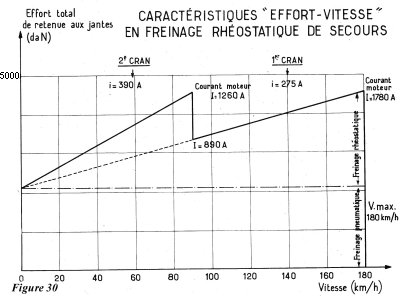
 Caractéristique en freinage rhéostatique
Caractéristique en freinage rhéostatique
La figure 30 donne la caractéristique obtenue dans ce cas avec superposition d'un freinage pneumatique dont le valeur moyenne
s'établit à 4,30 t environ.
La suite 
|



