L’automatisme de circulation et de régulation des trains
Le but fondamental recherché en exploitation ferroviaire est l’accroissement du débit des lignes économiquement nécessaire, tout en
maintenant la régularité du trafic dans un système de chemin de fer où les
circulations sont généralement hétérogènes.
Les techniques actuelles permettent cependant d’envisager sur rails une automatisation de la circulation fondée sur un processus industriel
tenant compte des infrastructures, des contraintes d’exploitation, de la signalisation, des caractéristiques cinématiques et dynamiques des
trains et de la régulation.
Cette dernière revêt même une importance telle, en certains cas que l’automatisme devient une nécessité d'exploitation.
Ces techniques semblent même permettre de pouvoir envisager une automatisation complète de la circulation, c'est-à-dire de pouvoir
commander et contrôler, à partir d'un poste central, l’ensemble des mouvements sur un réseau, et donner à chaque train des informations
agissant sur la commande de la traction et du freinage en fonction des circulations situées en aval.
L'objet des études et réalisations de la S.N.C.F. est beaucoup plus modeste et consiste à rechercher si un certain degré d'automatisation
peut être introduit judicieusement pour résoudre, avec le minimum de coût, des problèmes concrets, en tenant compte des moyens existants,
et de rechercher les compléments strictement nécessaires pour réaliser un système d’exploitation suffisamment sûr et des gains de temps
suffisamment réels. En effet, l’automatisation n'est pas une fin en soi mais doit être un moyen en vue d'augmenter la sécurité, le débit,
la réduction des retards, la diminution de l’énergie, mais avec toujours en trame de fond le coût minimal.
C’est avec cet objectif qu’une étude est actuellement en cours à la SNCF pour le trafic entre Juvisy et Paris
Le trafic Paris-Juvisy :
On sait que le trafic, sur ce tronçon de ligne à quatre voies seulement, est particulièrement dense à l’heure de pointe du matin,
dans le sens Juvisy-Paris, et se compose, d'une part de trains de banlieue provenant d`Etampes et des lignes convergentes provenant de
Dourdan à Brétigny, de Versailles à Savigny-sur-Orge, de Rungis-Orly à Choisy;
d’autre part de trains de grandes lignes provenant des Aubrais et venant soit de Bordeaux, soit de Toulouse.
Le trafic banlieue de la Région du Sud-Ouest est croissant et la facilité de pénétration et de dilution dans Paris par les gares d`Austerlitz,
de Saint-Michel et d'Orsay contribue particulièrement à son accroissement: c’est ainsi que le nombre total de voyageurs de banlieue transportés
est passé de 25,9 millions en 1954 à 36,4 millions en 1965, et il atteindra plus de 40 millions de voyageurs annuels pour la période 1970-1975,
compte tenu de l’urbanisation de la région Juvisy-Etampes et de nouvelles liaisons sur Orly-Rungis et, éventuellement, Corbeil.
Le mouvement journalier de 120000 voyageurs quotidiens pour la seule banlieue disposant de deux voies atteint le maximum de toutes les gares de Paris
(En effet pour St Lazare, par section banlieue à 2 voies, on n’atteint pas 100000 v/j et la plupart des autres gares parisiennes disposent de
4 voies banlieue ou plus, jusqu’à des distances considérables du terminus)
En particulier à l’heure de pointe du matin [7 h 30-8 h 30), le nombre de voyageurs est passé de 16000 en 1954 à 20000 en 1962 et 24000 en 1966;
il est actuellement de 27000, ce qui correspond à dix-huit trains de banlieue pouvant transporter chacun 1500 voyageurs.
A ce trafic de pointe “banlieue” se superposent, d’une part six à huit trains de grandes lignes provenant des Aubrais,
d’autre part entre Choisy et Ivry, trois ou quatre trains de messageries.
Ce trafic sature pratiquement les deux voies paires actuelles, et il convient de rechercher si une automatisation judicieuse permettrait
d'éviter, ou de différer, la construction d’une cinquième voie entre Paris et Choisy et
éventuellement, jusqu'à Juvisy, en vue d’acheminer vers Paris, à l'heure de pointe matinale. 35 à 40000 voyageurs.
Ce trafic nécessite la recherche des moyens d'augmentation du débit pour près de vingt-huit trains de banlieue,
une dizaine de trains de grandes lignes et trois à quatre trains de messageries: soit une augmentation globale de plus de 30 %.
(Note 1)
Débit en ligne
Des études analytiques ont été effectuées afin de rechercher, d’une part les modifications à effectuer sur la signalisation et,
d'autre part, en vue d’élaborer automatiquement, à l’aide d'ordinateurs et d'une table traçante, des graphiques optimaux, dits à sillons serrés,
véritable simulation du trafic vu depuis une table de régulateur.
Les premières études sur ordinateur IBM 360-75 ont montre que l'on pouvait vraisemblablement atteindre sur les infrastructures existantes des
augmentations
notables du débit. de l'ordre de 30 '%. sous réserve d'un aménagement judicieux de la signalisation, d’une automatisation de la marche des trains de
banlieue et de la mise à disposition de techniques modernes au centre de régulation.
Toutefois, pour obtenir ces forts débits. la .précision dans la marche doit être de l'ordre
de +/- 10 à +/- 20 s. en tout point de la ligne et non seulement aux arrêts en gare ou au terminus. où cela est déjà relativement assez bien réalise
par les conducteurs : les débits seront d'autant plus élevés que les précisions dans la marche seront plus fines.
Des moyens à base d’automatisme semblent seuls pouvoir permettre d’aider les hommes pour rendre opérationnelle une exploitation aussi élaborée dite
à sillons serrés.
Conception du système automatisé de circulation et de régulation des trains
Tous les éléments en interaction entrent dans ce processus :
organisation des mouvements, traction, signalisation, régulation. et nous les examinerons successivement :
Organisation des mouvements.
-
En fonction des études précitées, des horaires, des marches et des voies disponibles, l’ordonnancement des trains doit être
conforme aux graphiques à sillons serrés. En cas de perturbation, il convient de donner au régulateur des informations en temps
réel et des moyens appropriés pour lui proposer des choix et des critères pour prendre des décisions, afin d'écouler le trafic
dans de bonnes conditions.
Traction.
Pour respecter avec précision les horaires, non seulement aux gares, mais également en ligne, pour conserver
au mieux les intervalles prescrits par les graphiques et circuler à “voie libre ”, il convient, dans les automotrices de banlieue,
d'introduire un programme de marche automatique et de laisser au conducteur les fonctions de contrôle, de décision et d'observation
des signaux.
Cet automatisme permet le respect automatique des vitesses limites l’arrêt automatique au but, le rattrapage immédiat des retards
compatibles avec la marge et la consommation minimale d’énergie; nous y reviendrons ci-après plus en détail.
En corrélation avec la régulation, des dispositifs complémentaires sont envisagés à bord des mobiles : liaison radio entre régulateur et
conducteur, identification des trains de banlieue et indication au conducteur de l’écart entre la marche réelle et celle inscrite au fascicule horaire
pour les trains de grandes lignes entre Les Aubrais et Juvisy.
Signalisation.
Le découpage des cantons doit être modifie localement, conformément aux études de débit et les nombreux
postes électromécaniques entre Paris et Juvisy doivent être concentrés dans des postes tous relais à transit souple [PRS).
Régulation.
Le régulateur aura à gérer un réseau exploité avec une forte densité de circulation pendant l'heure de pointe,
de l’ordre de 42 trains au total.
Des problèmes importants se posent ainsi au centre de régulation :
- connaître rapidement une amorce de perturbation,
- prendre une décision pour l’insertion des trains, au niveau de Juvisy, en fonction d'une situation anormale,
par exemple, train de grande ligne désheuré,
- prendre une décision de “fluidification ” pour éviter l'arrêt d'un train de banlieue, en cas de désheurement,
à la convergence des voies paires, à l'entrée dans la voie unique donnant accès à la gare souterraine banlieue d`Austerlitz.
Un tel système suppose implicitement un travail en temps réel c'est-à-dire un processus ou on recueille et analyse des données et où on
tire les résultats, restituant ceux-ci au système avant que l’évolution des données les ait périmés. C'est pourquoi on a imaginé un
système à quatre “niveaux” de fonctions définis ainsi :
- niveau 1 : prise de l'information et exécution des décisions.
- niveau 2 : traitement des informations,
- niveau 3 : supervision du régulateur, contrôle des décisions et éventuellement prise de décision, établissement de
l'ordonnancement des circulations si les décisions proposées ne satisfont pas aux conditions actuelles du trafic.
- niveau 4 : aide à l’exécution des décisions : emmagasinement dans un programmateur de l'ordre dans lequel les
itinéraires doivent être tracés par les postes PRS commandant la zone envisagés, et éventuellement transmission d'ordre de régulation
pour modification de marche des trains.
Les moyens à mettre en œuvre à chacun des quatre niveaux des fonctions précédentes sont les suivants :
- pour le niveau 1 : des capteurs d’informations donnant l’identification des trains, leur position et des installations classiques de signalisation.
- pour le niveau 2 : un calculateur, pour collecter les informations et effectuer des traitements afin de présenter au régulateur le
graphique des trains et, à l’aide de programmes, projeter la situation future en signalant éventuellement les conflits, compte tenu des
contraintes de circulation,
- pour le niveau 3 : un “visualisateur”, qui permet à l'homme de “dialoguer” facilement avec le calculateur, de contrôler des décisions et
éventuellement d'en prendre de meilleures en fonction des conditions du moment.
- pour le niveau 4 : un programmateur, qui emmagasine les itinéraires souhaités pour temps de l’ordre du quart d'heure, ce qui correspond
à la durée d'une batterie de trains, trace automatiquement sur le terrain les itinéraires, par l’intermédiaire des postes de signalisation
et du système de transmission permettant d’émettre les informations pour réguler la marche des trains.


Principe et technologie des sous-systèmes envisagés et en cours d’expérimentation
|
Identification des automotrices.
Ce dispositif a été réalisé par TFIT. Le conducteur affiche le numéro du train, soit 7 chiffres, par l’intermédiaire de boutons, avant
le départ, à l'origine de la zone; le numéro prépare les circuits électroniques
du “répondeur” placé sur l'automotrice (cinq oscillateurs de code et un oscillateur de synchronisation, six fréquences de 15 kHz en 15 kHz,
de 52,5 à 127.5 kHz).
Un appareil fixe, en bordure de voie, dit poste de lecture, assure les fonctions suivantes: alimentation en 15 kHz du répondeur,
dès l’approche d'un train, par couplage électromagnétique, réception des fréquences émises par le répondeur placé sur le mobile
(trois fréquences parmi cinq, ce qui permet dix combinaisons) et retransmission télégraphique de l’information sur le circuit spécialisé
vers le calculateur du centre de régulation à la vitesse de 200 bauds, mais pouvant aller jusqu'à 2400 bauds si nécessaire.
Le cycle de lecture a une durée totale de 25 ms, c’est-à-dire qu'une longueur de boucle de l’émetteur d’environ 3,5 mètres pourra
transmettre trois cycles pour un train passant à une vitesse de 160 km/h.
Localisation des trains.
La localisation des trains se fait dune manière discontinue, au moyen de boucles dans la voie, judicieusement réparties dans les
gares et aux abords de certains appareils de voie.
|
 |
Les informations recueillies en concommitance avec celles de l’identitication permettent au calculateur de suivre les mobiles
dans l’espace et dans le temps.
L'équipement ?xe de localisation comprend deux boucles couplées de quelques mètres installées dans la voie,
l'une émettant un courant de fréquence de l'ordre de 10 kHz, l'autre, en absence de circulation, reçoit de l’énergie et excite un relais :
la présence d'un mobile désaccords le système et permet de recueillir une information de localisation.
Moyens de transmissions régulateur-conducteur.
Cette liaison s'effectue par l’intermédiaire de postes émetteurs-récepteurs radio, les uns fixes, situés le long
de la ligne à Ivry, Juvisy, Sainte-Genevieve-des-Bois, couvrant la ligne Bretigny - Paris-Austerlitz,
soit respectivement distants du poste de régulation de 4, 19 et 25 km environ, les autres, mobiles, à bord des automotrices.
Ces émetteurs et récepteurs sont reliés au circuit de régulation 4 fils à la disposition du régulateur, et les fréquences
de radio utilisées sont dans la bande de 160 MHz. Les antennes sont du type quart d'onde et les antennes fixes sont installées
soit sur des pylones d’éclairage comme à Juvisy (30 m de hauteur) soit
sur des potences de signalisation comme à Sainte-Geneviève des-Bois, à 8 m de hauteur.
La puissance d’émission est réglée entre 1 et 5 W, suivant les conditions locales.
Il existe ainsi pratiquement une sélection dans l’espace, ce qui permet au régulateur de converser avec les conducteurs d'une zone donnée.
Bien entendu, s'il se révèle nécessaire de réaliser un système sélectif, cela
est possible puisque les mobiles sont identifiés; toutefois, pour des raisons économiques, le solution expérimentée semble suffisante.
Moyens de transmission d'information de fluidification aux trains de grandes lignes.
Ces moyens doivent pouvoir permettre au régulateur de transmettre des informations aux conducteurs
des trains de grandes lignes lors de perturbations, soit que ces derniers aient été désheures, soit que le trafic de banlieue,
prioritaire lors de la pointe matinale, soit perturbé et nécessite de désheurer les trains de grandes lignes, c'est-à-dire de
les “fluidifier” en les insérant à l’heure et à la vitesse voulues aux abords de Juvisy, de manière
à réduire les perturbations.
Là aussi, la technique permettrait de concevoir un système très élaboré avec un câble dans la voie, mais le nombre de locomotives
existantes qu'il conviendrait d’équiper étant de plusieurs centaines, il s'est révélé impératif, pour des raisons économiques, de n’envisager
que des dispositifs localisés, installés le long de la voie.
Deux dispositifs sont en cours d'expérimentation :
- l’un se situe à environ 25 km de Brétigny et affiche automatiquement l’information de temps. De 1 à 9mn, à 30s près, que le conducteur
peut lire en clair au passage: ce dernier s’impose alors une règle de conduite pour respecter cet écart d'horaire par rapport à sa marche,
de manière à respecter au mieux son insertion à Brétigny;
- 1'autre est constitué par des jalons implantés tous les kilomètres, sur une zone de 25 km en amont de Brétigny, présentant
des flèches lumineuses dirigées vers le haut ou vers le bas et symbolisant des ordres d’accélération ou de décélération.
Ainsi le conducteur peut, par exemple, en réduisant sa vitesse de 120 km/h à 60 km/h, perdre environ 30 s entre deux jalons espaces de 1 km,
ou, au contraire, rattraper un retard par la vitesse limite de ligne.
- La régulation automatique peut, en fonction des circonstances, allumer les jalons avec les symboles d’accélération ou de décélération,
suivant les ordres du calculateur, mais contrôlés par le régulateur qui peut toujours intervenir à son gré.
Calculateur et visualisateur.
Le service de la Recherche de la S.N.C.F., avec la collaboration de la CII et de la CITEC, a expérimente un système
calculateur-visualisateur existant, afin de rechercher le plus économiquement possible si un tel système pouvait résoudre
les besoins et objectifs précités pour une régulation automatique du trafic.
Les études et l'expérimentation ont été effectuées sur le calculateur associe à un visualisateur du laboratoire de physique
nucléaire du Collège de France.
M. Autruffe, du service de la Recherche, donne des exemples de régulation des temps
de parcours par utilisation de la marche sur l'erre
|
Le calculateur, type CAE 90.10 a les caractéristiques suivantes :
circuits intégrés, mémoire de 32 000 mots, temps réel et programmation en langage machine.
C'est donc un ordinateur relativement modeste. Les “péripheriques” classiques en sont: un lecteur de cartes rapide,
un perforateur de ruban, deux dérouleurs de bandes, une imprimante et une machine à écrire.
La console de visualisation, sorte de perfectionnement de l’écran cathodique d`oscilloscope ou de téléviseur à les
caractéristiques suivantes : type graphique. 1000 lignes adressables à 1000 points par ligne, génération de vecteurs fins ou épais,
et de caractères, photostyle de dialogue et horloge interne pour demande de rafraîchissement de l’image en 33 ms.
Le calculateur fournit au visualisateur les informations pour tracer les graphiques des trains sous la forme habituelle,
espace-temps pour une durée de 20 mn, en distinguant de part et d'autre du temps originel le passé et le futur, sur des périodes
respectivement de -5 à 15 mn.
Le calculateur peut donner la prévision du trafic sur un programme “chaix” établi à partir de tables de marches théoriques
introduites une fois pour toutes dans l’ordinateur, et qui ont été élaborées pour les marches introduites dans le programmateur
de conduite automatique des automotrices, ou des fascicules horaires suivis par les conducteurs des locomotives de grandes lignes.
Le régulateur est avisé d'un conflit possible lorsque l'écart dans le temps entre la marche de deux trains devient inférieur à
une valeur limite, de 30 s à 2 mn suivant les conditions locales, qui caractérise le fait que le train suiveur risque de rencontrer
une signalisation lui imposant un ralentissement ou même un arrêt.
|
Le conflit est
signalé au régulateur par un cercle lumineux clignotant, entourant le point où le conflit se produirait: le calculateur propose ou,
éventuellement, décide une solution, pour éviter ce conflit en fonction de règles programmées à partir de données empiriques ou
mathématiques, ou même, éventuellement, par un simulateur.
Le régulateur reste cependant maître de la situation, contrôle le système et, éventuellement, impose une autre solution.
Le dialogue entre le régulateur et le visualisateur se fait actuellement d'une manière simple, en utilisent un photo-style:
la présentation de ce crayon lumineux sur des points du graphique donne en clair sur l'écran le numéro du train considéré, permet de
modifier la marche de celui-ci et de voir directement l'effet en résultant au graphique, de déterminer le mouvement de retard qu'il
convient d'imposer à un train non prioritaire pour fluidifier la circulation, délimiter le graphique partiel d’une zone déterminée, etc.
Les expérimentations ont ainsi permis de dégager les possibilités prometteuses du système et de le compléter en vue de rechercher,
en cas de perturbation, les meilleures solutions pour écouler le trafic. Bien entendu, si le besoin le justifie, il est possible de
disposer, en temps réel, soit de tableaux horaires fournis par une imprimante, soit de graphiques tracés automatiquement pour des
contrôles ou études à posteriori.
Le processus de régulation automatique des trains, dont chaque sous-système fait l'objet d’expérimentation, a été élaboré avec
le souci de respecter au mieux le critère de minimum de coût, c'est-à-dire d'utiliser au maximum les moyens existants, de n'ajouter
que tes suppléments strictement indispensables pour augmenter l'efficacité de la régulation qui doit être aussi automatisée que possible,
et donner au régulateur le moyen de prédéterminer des amorces de perturbation, les contrôler, en prenant des décisions, pour répondre au
double critère du maximum de débit et de la qualité de service, c'est-à-dire la minimisation des retards.
Les études et expérimentations futures permettront vraisemblablement d'accroître les performances, et de bénéficier des évolutions
technologiques, en particulier dans les problèmes de transmission, de traitement
de l’information et de visualisation. notamment avec les visualisateurs polychromes qui permettraient ainsi de mieux distinguer les
trains sur un même graphique de régulation.
L'automatisme de circulation appliqué au matériel moteur
Le second des exposés sur les solutions actuellement envisagées et expérimentées par la S.N.C.F. était présenté par M. H. Autruffe,
auquel nous emprunterons également de très larges extraits.

Une présence inattendue en gare des Brotteaux: : la rame Z-5356, équipée d'automatisme,
l'un des 60 éléments automoteurs
de la banlieue Sud-Ouest de Paris. |
Nos lecteurs ont pu constater dans le processus industriel d’automatisme qui vient d’être décrit, que le déplacement du
train constitue l’élément productif et tout ce qui entoure le déplacement n'est là que pour
le servir et lui donner sa pleine efficacité.
Un train, s’il était seul, n’aurait donc qu'à se laisser charger et guider à sa convenance propre. Malheureusement, il se
déplace en réalité au milieu d'autres trains dont les ambitions sont semblables.
Par suite, sa liberté, comme dans toute société bien organisée, doit s'arrêter au moment où elle se
transformerait en gène pour les trains encadrants, ce que nous appelions “conflit” sur un graphique, et ce moment arrive
d'autant plus vite que les circulations sont à sillons plus serrés.
Le premier objectif des systèmes qui gouvernent la marche des trains est donc de restreindre suffisamment la liberté de marche
d'un train pour que la sommation des libertés individuelles de trains successifs n'engendre pas la gène; nous avons vu que des trains
pouvant se succéder à intervalle de 2 mn, c'est à +/-10 s, voire à +/- 20 s, qu'on peut fixer l'écart admissible entre l'horaire
théorique et l'horaire réel. Un tel respect est évidemment difficile à obtenir d'un conducteur dont la fiche horaire “travaille” à la minute.
De plus, des excitations perturbatrices internes ou externes au système, font fréquemment éclater ces limites
strictes.
|
Le second objectif des systèmes automatiques sera donc d'aider à amortir, si possible sans oscillation, les réponses à ces
excitations perturbatrices, et donc de tout ramener dans l'ordre, et au plus tôt. Il est évidemment souhaitable que le même équipement
d'automatisme puisse remplir les deux fonctions. Autrement dit, il faut donc ajouter à la précision de conduite normale, dans le temps,
le rapidité de correction en horaire perturbé.
Enfin. automotrices et locomotives ayant une utilisation différente. puisque spécialisée dans un cas et pas dans l'autre, les solutions
apportées diffèrent.
Nous parlerons donc successivement des automotrices puis des locomotives, en distinguant dans chaque cas le processus en régime normal,
et le processus en régime perturbé, en nous attachant à montrer combien l’automatisme peut devenir une aide précieuse su conducteur électricien
dans la qualité même de sa conduite.
Principes de traction et freinage en automatisme sur les automotrices sud-ouest
L'objectif est de respecter au mieux l’horaire théorique d'une circulation de banlieue. Rappelons d'abord comment est déterminé cet horaire :
la composition du train de banlieue est fixée: par exemple. dans le cas de Paris-iuvisy, un train comporte un ou deux éléments,
constitués chacun d'une automotrice Z 5300 et de 3 remorques. Connaissant les caractéristiques d'effort en fonction de la vitesse de la motrice,
la résistance à l’avancement de l'ensemble de la rame, le profil de la ligne, et les vitesses maximales autorisées, on peut calculer le temps minimum
qu'il faut au train pour effectuer son parcours. On sait que ce temps correspond à une marche que l'on qualifie de “tendue”, précisément parce qu'elle
ne comporte aucune détente. Si cette marche tendue était toujours appliquée en service, l’automatisme serait fort simple.
Faisant toujours appel à la performance la meilleure, Il n'y aurait pas lieu de “réfléchir”, et quels que soient les aléas rencontrés eu cours
d'une marche, les ordres à donner à la motrice seraient toujours les mêmes. Mais il est clair que les aléas se répercuteraient intégralement sur
l’horaire, et un train ne serait a l'heure que dans le cas d'absence totale d'aléas, cas très hypothétique.
Ces aléas existant toujours, pour pouvoir en tenir compte on utilise une marche qui comporte une certaine “détente” : par exemple. et c'est
le cas de Paris-Juvisy, on alloue une marge de 5 %. c'est-à-dire que la durée accordée pour un parcours donné est égale à 1.05 fois la durée minimale
possible.
Le problème qui se pose est donc de savoir comment ajuster l’utilisation de cette détente en fonction des retards, ou avances, possibles :
un train peut aussi s'arrêter dans une gare moins longtemps que prévu. L'automatisme doit donc réfléchir et prendre des décisions en fonction de
ces retards ou avances, pour utiliser au mieux la détente disponible.
C'est ce qui fait sa complexité, mais aussi son originalité.
En d’autres termes, et à moins que l’utilisation de toute la détente possible soit nécessaire si le retard est important (et en banlieue, sur de faibles parcours, les détentes se chiffrent seulement en dizaines de secondes. par exemple 60 s pour un trajet de 20 mn), le problème est de savoir comment “perdre ” le temps supplémentaire
dont on dispose. Le critère adopté est celui de la consommation minimale d'énergie. Il consiste à prendre toute la
marge par des marches sur l’erre, et non pas par une diminution uniforme de la vitesse.
En outre, la répartition de la marge entre les différents trajets de gare à gare d’un parcours doit se faire en fonction de lois
précises. On peut établir pour chaque parcours entre deux points une courbe de consommation en fonction du temps, en supposant des marches
sur l’erre de plus en plus longues, et déterminer ensuite le lieu
des points correspondants à la consommation la plus faible, que devra respecter l'automatisme de conduite.
L'application stricte de ce principe conduit à “étaler” dans une certaine mesure le rattrapage d’un retard. Si cela
est admissible en heure creuse, il pourrait en résulter une gène en heure de pointe, lorsque la précision de +/- 10s est nécessaire pour
le respect de la marche théorique. Aussi, la courbe est modifiée pour les heures de pointe, et la marche “tendue” est prescrite pour le premier
trajet dès que le retard constaté au départ correspond sensiblement à la marge allouée.
En résumé, l'automatisme choisit i'instant de marche sur l’erre en fonction de l'avance ou du retard du train. En outre. l'accélération au
démarrage, le respect des vitesses limites en ligne, le freinage sont des actions indépendantes de l'horaire, qu'il faut aussi automatiser pour
réaliser un processus complet.
Si l'intérêt de la programmation des vitesses limites à respecter est évident, celui du freinage automatique lors des arrêts en gare l'est moins.
Un conducteur sait parfaitement arrêter son train à un emplacement bien précis, mais, souvent, pour ajuster l'arrêt, la décélération moyenne sera faible,
il faut en fait allier précision dans l’arrêt
et régularité dans les décélérations, tout en conservant une valeur acceptable de décélération.
C'est pourquoi la fonction d’arrêt a elle aussi été automatisée. Le système adopté sur une automotrice expérimentale répond au principe
du “tir au but”.
Au passage d'une balise judicieusement placée, on déclenche dans l'engin, une courbe de freinage en fonction de |'espace parcouru : la vitesse
doit diminuer selon une loi approximativement parabolique. Le frein est appliqué lorsque la vitesse réelle dépasse cette vitesse de consigne, et
l’action du frein est modulée pour que la vitesse
réelle diminue comme la vitesse de consigne. La difficulté est toujours la même : l’action du frein est lente, et, lorsque l'on s'approche du point d'arrêt,
la correction devient difficile à faire. Un freinage abordé à partir de 40km/h est plus délicat a réaliser de façon précise qu'un freinage aborde à 120 km/h.
On pourrait gagner en précision, si on déclenchait le freinage plus tôt, et si on freinait moins énergiquement, mais le temps de parcours serait
augmenté.
Les ordres concernant les vitesses limites et l'arrêt au but ne dépendent que de l'emplacement du train, et ils peuvent être donnés par un programme
fixe enregistré dans l'automotrice. Il est clair que ce programme ne tient pas compte de la position des signaux de la voie.
Il a pour rôle de réaliser des marches prédéterminées. S'il
survient un obstacle, qui se matérialise par des signaux à l’avertissement ou à l'arrêt, c'est au conducteur d'intervenir et de reprendre
la conduite manuelle. L’automatisme est là pour résoudre un problème de régulation,
mais non pour sa substituer au conducteur, qui est simplement décharge d'un travail de routine, que les moyens d’information dont il dispose
actuellement ne lui permettraient pas de remplir avec la précision souhaitable.
|

M. Autruffe présente une balise de déclenchement de freinage (note 3)
|
Réalisation sur l’automotrice Z 5356 :
Les équipements automatiques sont rassemblés dans une armoire située dans le compartiment à bagages, au voisinage de la cabine de conduite de la motrice.
Elle comporte, de haut en bas, les tiroirs suivants :
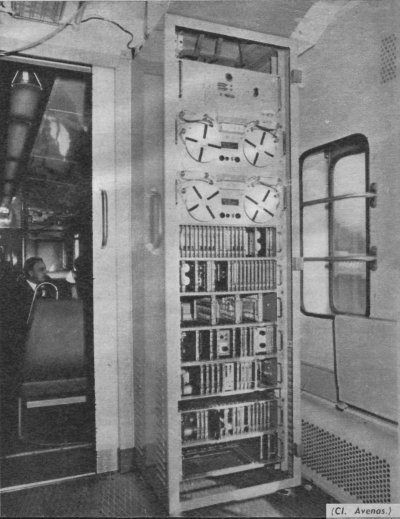
L'armoire d'appareillage automatique de la Z-5356. On distingue, de haut en bas, l'alimentation stabilisée,
le dérouleur de bande "espace", le dérouleur "temps", l'horloge et la logique électroniques, la régulation de vitesse imposée et le dispositif
d'arrêt au but. On notera la remarquable unification des plaquettes d'électronique. (note2)
|
-- Tiroir alimentation, réalise par Faiveley : il fournit. à partir de la batterie du véhicule les tensions stabilisées nécessaires aux différents
dispositifs électroniques.
-- Tiroir dérouleur espace : les consignes d'accélération, de vitesses limites, de freinage sont programmées sur une bande perforée qui se
déplace proportionnellement à l’espace parcouru.
-- Tiroir dérouleur temps : les consignes de “couper-courant” en fonction du temps sont programmées sur une
seconde bande perforée.
--Tiroir logique et horloge : ce tiroir comporte une horloge électronique. à oscillateur à quartz, et les dispositifs de logique commandant
le fonctionnement des dérouleurs et émettant les ordres de marche correspondant. Ces trois tiroirs sont faits par Métravel.
--Tiroir vitesse-espace réalisé également par Faiveley : partant d'un capteur placé sur un engrenage de traction. Ce tiroir élabore un signal
analogique de vitesse et des “tops” d’espace parcouru : top 10 m et top 1,25 m.
-- Tiroir vitesse imposée réalisé par Sécheron : ce tiroir est l’intermédiaire entre l'équipement de marche automatique et l’équipement de
traction de l’automotrice. Il donne à ce dernier des ordres de vitesse. qu'il est capable de faire respecter par une action judicieuse sur les
moteurs de traction et sur le frein.
-- Tiroirs d’arrêt au but, réalisés par la CEM : ces tiroirs réalisent l'arrêt automatique en gare. Sur un signal venant d’une balise placée
sur la voie, on élabore une parabole de freinage de coordonnées vitesse-espace. et une modulation du freinage est réalisée pour que la vitesse
réelle suive la vitesse de consigne.
Il sortirait du cadre de ce résumé de vouloir détailler le fonctionnement des différents tiroirs, et plutôt que de présenter des schémas synoptiques
où les carrés blancs donnent une fausse impression de simplicité et cachent les vrais problèmes, il semble préférable de ne s'attarder que sur quelques
points originaux.
Il n'est pas besoin d'électronicien pour faire les programmes
(Rappelons que la carte ou la bande perforée est due au mécanicien français Falcon en 1728. Vaucanson
et Jacquard perfectionneront plus tard cette idée. )
L'avancement de la bande “ espace ” se fait par pas de 100 m, calculés à partir des tops de l0 m. Cette bande
comporte ainsi des repères de rectification d’espace parcouru
On utilise à cet effet les crocodiles, dont l’emplacement sur la voie est bien connu. Lorsqu'un crocodile est détecté, la bande se recale sur
la position correcte indiquée par sa figuration sur une piste de la bande.
La bande “temps” a un fonctionnement plus complexe. Au signal de départ, un comparateur calcule le temps restant à parcourir, par comparaison
de l’heure de l’horloge à cet instant avec l'heure d'arrivée affichée par le
conducteur.
|
La bande temps se déroule alors dans un sens, d'une quantité égale à ce temps. Sur d'autres pistes de cette bande un code “espace”
représente une distance qui est celle de l’espace de “couper-courant” correspondant au temps indique par le comparateur. La bande temps se
réenroule en fonction des tops d’espace, et lorsqu’elle est revenue à son point de départ elle donne un ordre de marche sur l'erre.
Le nombre de types de trains mis dans l’automatisme est de 9 (trains directs, semi-directs,omnibus). Le choix du programme, fonction du type de
train est fait par le conducteur au moyen d'un codage à 2 chiffres sur cadran téléphonique. Les bandes recherchent alors les programmes convenables,
et se positionnent sur la section origine du programme. Il n'est pas possible de changer un programme en cours de route.
Pour éviter que les trains directs ne s'arrêtent aux gares de passage, l’action de la balise d'arrêt au but n'est transmise à l’équipement
que sur autorisation de la bande espace, qui a “déverrouillé” l’action de la balise uniquement pour les gares d’arrêt correspondant au programme.
Expérimentation et conduite normale.
La mise en œuvre de l’automatisme nécessite de la part du conducteur tes manœuvres suivantes:
- au départ: mise sous tension de l’équipement depuis un coffret place dans la cabine de conduite, avec
- numérotage de la catégorie du train par l’intermédiaire du cadran téléphonique placé sur le coffret (une signalisation confirme en retour
le numéro du programme choisi).
- affichage de 1'heure d'arrivée au terminus.
- affichage du nombre d'éléments [1 ou 2} composant le train,
- action sur le bouton départ;
- en route: si les signaux n'apportent aucune restriction à la marche normale, le conducteur n’a pas à intervenir.
Un voyant de contrôle lui permet de vérifier que la balise de déclenchement de l’arrêt au but a été effectivement perçue.
La balise est placée suffisamment tôt pour que, dans le cas contraire, le conducteur est Ie temps d'intervenir, et de freiner.
Si la signalisation s'oppose à la marche normale du train, le conducteur peut, par un bouton placé sur le coffret, mettre
temporairement l’automatisme “en veilleuse” l’équipement se met en marche sur l'erre, mais les bandes continuent à tourner et le frein
est toujours actif. Le conducteur peut à tout moment reprendre la marche automatique: une nouvelle lecture du temps restant étant faite
à ce moment-là, le retard éventuellement acquis est pris en considération par l’équipement.
Les résultats ont été satisfaisants dès les premières expérimentations. Quelques erreurs dans les programmes ont montré l’intérêt d'une solution souple.
Le rattrapage d’un retard de 20 s, par exemple. se fait petit à petit, sur 2 ou 3 intervalles élémentaires, conformément au principe de la
consommation minimale d'énergie. La précision de l`arrêt au but est de +/- 1 m dans 80 % des cas.
 |
 |
La cabine de conduite de la Z-5356 montre, à gauche, la commande de l'appareillage d'automatisme : en haut,
les voyants de défaut, balise, commutation manuelle, couper traction. Au dessous, le commutateur affichant le nombre d'élément du convoi et les
indicateurs horaires : heures, minutes, secondes. Au dessous encore et au centre, le cadran téléphonique d'affichage du type de train. Enfin,
les interrupteurs de mise en service de l'automatisme On notera à l'extrême droite le radio-téléphone de liaison avec le régulateur.
sur la photo de droite, matériel de réserve : un dérouleur de bande et un tiroir d'électronique (VI) (note 3)
|
Conduite automatique en régime perturbé.
En régime perturbé, le train peut soit avoir à prendre de l’avance (très limitée, car la marge est faible}, soit à
prendre du retard, soit à circuler complètement dans un sillon décalé. L'heure d’arrivée du train affichée par le conducteur servant
de base au calcul du temps restant rend immédiate l’utilisation du dispositif en régime perturbé.
S'il s'agit d'une avance à donner à un train déjà parti de sa gare d’origine, il suffit d'avancer l'heure d’arrivée déjà affichée pour
qu'au départ de la gare suivante, le train se considérant en retard, opte pour une marche plus tendue.
S’il s'agit d'un retard pour un train déjà parti, le conducteur retarde l’heure qu'il a affichée:
au départ de la gare suivante, le train se considérant en avance, déclenchera très tôt la marche sur l'erre, de même qu'au départ des gares
suivantes, perdant ainsi, avec une consommation minimum d’énergie, un temps égal au retard imposé.
Pour circuler dans un autre sillon, il suffit de retenir le train à la gare d'origine ou à une
gare intermédiaire pendant un temps égal au retard qu’on désire lui faire acquérir, et d'afficher ce même retard. Le train circulera alors
dans ce nouveau sillon avec la même précision que dans le sillon normal. En d’autres
termes, le système permet de travailler en “temps relatif”.
En résumé, on voit que le régime perturbé ne demande qu'une liaison entre le régulateur et le conducteur pour la transmission des ordres
de décalage, mais que l’équipement d’automatisme permet, sans autre adjonction, d'exécuter ces ordres.
Principes d’automatisme appliqué aux locomotives et trains de grandes lignes
Le problème se pose différemment de celui des automotrices, pour des raisons tant techniques qu’économiques. La zone dense de circulation
est celle ou circulent les trains de banlieue. Les trains de grande ligne viennent par définition d'au-delà, et avant de voir comment les faire
circuler dans la zone dense avec une précision suffisante, faut-il déjà résoudre le problème de les amener à l'entrée de cette zone non seulement
à l’instant exact prévu par le graphique, mais encore à la vitesse normale de circulation. En fait, on peut même penser que c’est là le seul
problème à résoudre, car le train de grande ligne, sans arrêt dans la zone de circulation dense, n'a pas de raison de s'écarter beaucoup de son
horaire théorique si l'instant, et la vitesse d'injection dans cette zone, ont été respectés. Du point de vue économique, alors que les automotrices
de banlieue, spécialisées, peuvent utiliser en permanence toute installation d'automatisme dont elles sont munies, les locomotives ne remorquent
un train de grande ligne dans la zone de circulation dense, et en plus aux heures de pointe, que pendant une très courte période de leur roulement.
Les automatismes quelles peuvent comporter seront peu utilisés, et l’impératif du minimum de coût est plus contraignant que jamais. En outre,
le nombre de locomotives susceptibles d'assurer les trains de grande ligne est élevé.
Aussi, on a exclu toute action automatique directe sur l’équipement de traction, et l’on a cherché simplement à donner au conducteur des informations
simples pour l'aider à aller au plus près de son horaire théorique.
Réalisation.
L'objectif est d’indiquer au conducteur son avance ou son retard par rapport à son horaire théorique.
Cette indication est fournie périodiquement. Cette périodicité étant aussi régulière que possible pour faciliter la correction de marche que
doit faire le conducteur pour annuler petit à petit son décalage.
On pourrait évidemment se contenter d’indiquer sur un fascicule horaire détaillé l’heure théorique en différents points de passage du train,
de mettre à bord de la locomotive une horloge précise, et de laisser le conducteur faire le calcul de son avance ou de son retard.
Mais le conducteur a essentiellement une fonction de sécurité à remplir, et pour toute tâche supplémentaire de régulation qui lui est demandée,
il convient de l’aider au maximum.
Le dispositif imaginé, appelé dispositif de mise à l’heure théorique {DMHT} comporte, comme pour l’automotrice, un système comparateur entre
l'heure réelle donnée par une horloge électronique et l’heure théorique, inscrite de façon codée sur un disque.
Au lieu d'effectuer la comparaison au départ d'une gare d’arrêt, elle est faite tous les 5 km, cet intervalle étant déterminé par un compteur
d'espace, mis à jour, comme pour l'automotrice, par les crocodiles de la signalisation. Au lieu d’agir directement sur la traction pour déterminer
l'instant de marche sur l’erre dans le cas de l'automotrice, le résultat est simplement affiche dans un coffret place dans la cabine de conduite.
La simplicité de ce dispositif réalisé par Metravel, autorise l'emploi d'un schéma “ bloc ” pour expliquer le fonctionnement. Les 3 éléments
de base sont le disque horaire, l’horloge et le compteur d'espace. Tous les 5 km, le compteur d’espace émet un signal vers un circuit de commande,
qui transfère les indications du lecteur et de l'horloge dans des registres, effectue la comparaison des 2 registres et le calcul de l'écart les
séparant, puis fait tourner le disque pour le préparer à la lecture suivante.
Expérimentation en régime normal.
Le dispositif monté sur la locomotive BB 9259 fonctionne sur les 100 km précédant la zone de circulation dense, c'est-à-dire pratiquement
entre les Aubrais et Juvisy. Une balise met en route le dispositif peu après le départ des Aubrais. On affiche successivement 20 indications,
le disque tournant donc d'un vingtième de tour après chaque lecture. Le disque - particulier à un train donne – doit être mis en place par
le conducteur: c'est la seule manipulation qui soit nécessaire.
Les écarts indiqués sont limités à 9 mn 50 s, et ils sont, dans l'affichage. arrondis à 10 s près.
Les premiers essais ont montré que par corrections successives, le conducteur arrivait très rapidement à maintenir l'écart dans la fourchette
de 10 s. L'expérimentation sera donc étendue à d’autres locomotives.
 |
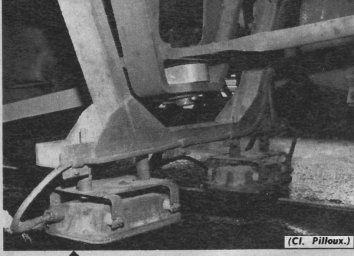
Ci-dessus, les capteurs d'informations montés sur un chevalet, sous caisse, à hauteur des bielles de traction basse de la BB 9259.
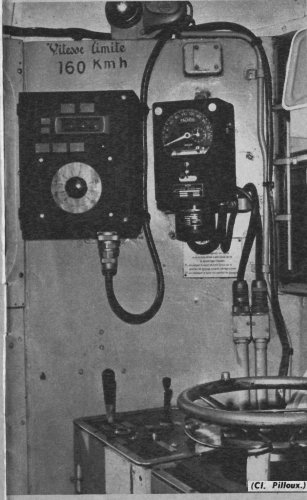
Ci-contre, le dispositif installé en cabine de la BB 9259. Le cadre rectangulaire à 3 chiffres (Tubes Nixie) donne les
minutes et les secondes. |
 |
Fonctionnement en régime perturbé.
De même que pour le régime normal, l’action sur les trains de grande ligne en régime perturbé doit se faire avant l'insertion du train
dans la zone dense, l'objectif étant toujours de recevoir ce train à un instant
précis, mais non plus l’instant théorique, et à sa vitesse normale, à l’entrée de la zone.
Deux cas sont possibles, selon que la perturbation et les décisions corrélatives prises par le régulateur sont connues longtemps avant
ou peu avant l'insertion du train, et qui seront ci-après dénommées “fluidification avancée” ou “tardive”.
Fluidification avancée.
La décision de désheurement a pu être prise soit avant que le train ne passe aux Aubrais, soit peu après. Dans la mesure où une liaison
radio permet au conducteur d'être informé de cette décision, le conducteur peut utiliser
le DMHT en se fixant comme objectif non pas d'annuler 1'écart qu'il indique, mais de le maintenir par exemple à “avance 2” si le régulateur
lui a demandé de se présenter avec 2 mn d’avance ou à “retard 3". etc.
Fluidification tardive.
La décision de désheurement n'a pu être prise que peu avant l’instant d'insertion du train dans la zone dense, par exemple 20 mn avant.
Pratiquement, cette décision ne peut qu'être un retardement, compte tenu de la faible avance que pourrait alors acquérir le train.
Le DMHT ne peut plus être utilisé. Le problème est de ralentir le train, puis de lui faire reprendre sa vitesse de croisière de telle sorte
qu'il se présente à la vitesse correcte, mais à un instant désheuré, à l'entrée de la zone dense. Si ce ralentissement est toujours fait avec
la même vitesse réduite, par exemple 60 km/h, on peut calculer
le temps nécessaire de circulation à 60 km/h, au lieu de la vitesse de croisière, pour perdre un temps déterminé. Il suffit alors, pour aider
le conducteur, de mettre à bord de l’engin un temporisateur réglable, sur lequel le conducteur reporte un chiffre correspondant au temps à perdre.
Ce temporisateur a été réalisé, et son expérimentation est prochaine. Il ne constitue pour le conducteur qu'un simple guide. Son action
annule le fonctionnement du DMHT, fait apparaître un voyant “60 km/h”, qui s'efface en fin de temporisation pour faire place à un voyant “120 km/h”.
A ce stade de l’étude et des expérimentations, il serait audacieux de vouloir émettre une conclusion générale applicable à l’ensemble
du matériel moteur. Remarquons simplement que les possibilités techniques sont très riches, que le conducteur n'a plus simplement un rôle de
sécurité à assurer. mais un rôle de régulation, laquelle tend à être de plus en plus fine, et qu'il convient de l'aider à jouer ce rôle.
C'est l’objectif des automatismes prévus, et l’expérience doit montrer dans quelle mesure ces automatismes sont suffisants, ou nécessaires.
C'est non seulement un problème de coût et de technique, mais aussi un problème d'ergonomie.
Autres réalisations d’automatisme ferroviaire
En dehors des applications précédentes, plus spécialement destinées à la régulation du trafic dans un cas particulier à la S.N.C,F.,
mais susceptibles d'extension à bien des problèmes de mouvements de trains hétérogènes, un rapport présenté par M. Majou indiquait la
conception suivie par la R.A.T.P. dans le cas
de la commande automatique du mouvement des trains sur les amorces de ligne régionale Est-Ouest du RER.
Comme nous reviendrons plus en
détail sur cette expérience à l’occasion de sa mise en service, nous n'indiquerons ici que les principes adoptés par ce système de commande
automatique, désigné S.C.A.
Contrairement aux problèmes de la S.N.C.F., il s’agit ici de circulations relativement homogènes, bien qu'à composition variable, mais à
conduite manuelle normale régie par les cantonnements de signalisation optique de
structure traditionnelle.
Le système de commande automatique, situé à la commande centralisée du trafic, ne traitera donc, dans l'immédiat,
que le mouvement des trains en service normal, par le jeu des commandes d'itinéraires, libérant les agents de station des fonctions d'aiguilleur,
sans s'étendre directement à la conduite des trains.
Cependant, certaines dispositions sont prises pour que l’automatisation de la conduite
des trains, telle qu'elle est déjà réalisée sur la ligne métropolitaine n° 11 et en montage sur la ligne n° 4, puisse être ultérieurement
adaptée au R.E.R. et réalisée en complément de l’action du S.C.A. Les fonctions actuelles du calculateur central, type 10020 de la CII,
sont donc la commande des itinéraires après identification décrit plus haut, comporte des balises en voie, alimentées à 9 GHz, donc à
fréquence radio-électrique, avec répondeur à
code télégraphique sur le train, plus d'autres balises dites “anonymes” car correspondant par exemple aux trains de marchandises sans
répondeur, constituées par un circuit de voie électronique à 8000 Hz.
Enfin, on notera que le régulateur central, toujours seul maître,
en liaison téléphonique directe avec les trains, assurera en régime perturbé les tâches de commande centralisée.
Ce sont de tous autres aspects d’automatisme, que ceux présentés par M. N. Keichinger pour le freinage des wagons débranchés dans les gares
de triage de la S.N.C.F., et par M. P. Essig pour le péage automatique et la
concentration des données sur les lignes régionales de la R.A.T.P. Bien que particulièrement intéressantes, ces études et réalisations
n'ont pu être abordées ici, faute de place et surtout parce qu'elles méritent une étude particulière, objet d’autres articles à venir.
Conclusion qui n'est pas automatique
Cet aperçu des possibilités, déjà toutes présentes, de l'informatique appliquée au domaine ferroviaire, dans sa nature même, à savoir le
mouvement des trains, nous montre bien la notion de “programmes de circulation Adaptatifs”, renseignés à tout moment par le contrôle
individuel de l’identification et de la position des trains, les modifications
étant suivant le cas, entièrement automatiques ou soumises à la décision d'un opérateur, lequel
reste toujours le cerveau de décision, l’automatisme n'étant là que pour l'aider.
On constatera aussi, pour conclure, que l'ordinateur
et ses télétransmissions ont en fait véritablement crée un nouveau facteur de rentabilité, de plus en plus essentiel, et ceci n'est plus
seulement valable en exploitation ferroviaire ou en gestion, à savoir la rapidité dans la décision.
Seul l’ordinateur permet en effet
d'obtenir des temps de réponse suffisamment brefs. Cette possibilité fondamentale de l’informatique, appliquée en automatisme n'est pas
sans influences sur l’homme, et ses modes habituels de pensée.
Nous mentionnerons plus particulièrement, à titre non limitatif de ces nouvelles frontières apportées au travail humain:
- l’extension des méthodes de “simulation”, dont nous avons vu un exemple plus haut, méthodes permettant d’approcher empiriquement les
réactions des systèmes les plus complexes;
- l’exigence : un souci de précision et de détail dans le travail intellectuel, où l'on ne peut plus se contenter de théories simplifiées,
aussi mathématiques soient-elles;
- enfin, et surtout, la rapidité d'action croissante à laquelle l’automatisme habitue, et qui est d'extrême importance dans un système de
transport, en temps réel.
Y. M T.
Note 1 :A l'heure ou nous recopions ces lignes, la majeure partie du trafic grandes lignes a été transféré au
TGV sur Montparnasse.
Note 2: L'unification des cartes d'électronique est due à un cahier des charges précis élaboré par la DETE et transmis à chaque fournisseur,
afin de s'assurer que le matériel fourni sera bien compatible avec les contraintes auquelles il sera soumis.
Note 3: Images rajoutées, non incluses dans l'article original
 |
Exemple de carte électronique répondant aux normes émises par la DETE, constituée d'un cadre en alliage d'aluminium
qui supporte :
- la carte électronique en verre-époxy 16/10 mm grade FR4, auto-extinguible, avec trous métalisés.
- le système de verrouillage mécanique de la carte dans son rack, avec la poignée d'extraction,
- le connecteur standardisé,
- les picots détrompeur
Le cadre métallique réalise également les glissières d'installation dans le rack. Toute la partie mécanique et le connecteur ont
été développés par la DETE et la société Faiveley.
Les constructeurs des ensembles électronique devaient utiliser cette mécanique pour les équipements destinés à nos machines |
 Retour Retour
|