PARTIE ELECTRIQUE - 4
X - L'APPAREILLAGE

|
Lors de l'examen du schéma de cette locomotive, nous avons vu qu'il était nécessaire de disposer d'un certain nombre
de contacteurs, d'un commutateur traction-freinage, d'un inverseur double.
Contacteurs
La gamme des contacteurs existants permet d'assurer l'alimentation de moteurs de traction absorbant jusqu'à 1250 A en
régime continu.
|
 |
|
En raison des intensités pratiquées sur la BB15000 (2600 A, puis 1900 A au cours
des démarrages, 1600 A en régime continu),
il a
été nécessaire de créer un nouveau contacteur électropneumatique (figure 55)
qui tient compte de toutes les améliorations dont on a fait bénéficier les contacteurs électropneumatiques en service (en particulier
fixation à plat des contacts principaux (fig.56) évitant les inconvénients des fixations par vis soumises à flexions alternées.
Par ailleurs, compte tenu de l'augmentation des masses des pièces en mouvement, le rappel par ressort de l'équipage mobile a été
supprimé et remplacé par un
|

|
rappel à effort constant sur toute la course du piston, grâce à un servo-moteur à action différentielle (fig. 57).
Le rappel est assuré par la pression d'air comprimé admis en permanence dans la chambre C.
Dans toutes les fonctions où le calibre de 1250 A était suffisant, les contacteurs électropneumatiques classiques ont
été utilisés. C'est le cas des circuits de freinage.
Commutateur traction-freinage et inverseur de sens de marche
Jusqu'à présent ce type d'appareil était constitué par un tambour à contact glissants. Il présente un double inconvenient :
- risque de décollement (et par suite d'amorçage) des contacts principaux par effet électrodynamique en cas de
surintensité (figure 58a).
- usure importante des segments et des doigts de contact dans le cas d'appareils à fonctionnement très fréquents.
Ceci est le cas du commutateur traction/freinage, tout particulièrement pour une locomotive équipée du dispositif de vitesse imposée.
Pour remédier à ces inconvenients, nous avons réalisé ces commutateurs avec contacts à rouleaux dans l'huile (fig.58b). Les prises de courant
sont reliées à des plots conducteurs et les connexions sont réalisées par un ensemble de 2 rouleaux parallèles portés par un chariot (fig.59).
On voit ainsi, qu'en cas de surintensité, les efforts électrodynamiques tendent à rapprocher les rouleaux et augmentent ainsi
la pression aux contacts. Les essais ont prouvé que de tels appareils pouvaient supporter sans inconvenients, des surintensités de 3000 A,
valeur très nettement supérieure à celle que l'on peut rencontrer en cas de défaut
|
sur les circuits de puissance. En outre, s'agissant de contacts roulants dans l'huile, les usures sont très réduites et les essais
d'endurance de ce type d'appareil ont montré que l'on pouvait assurer sans intervention, plus de 3 millions de manoeuvres.
 |
La figure 60 ci-contre donne une vue d'ensemble de l'appareil. On remarque, sur la face avant en
isolant statifié, l'ensemble des bornes de puissance et le servo-moteur pneumatique double. (Pour des délais de livraison, les 5
premières machines ont été livrées équipées d'inverseur à tambour. Celui-ci a été remplacé ultérieurement par un appareil à contact
à rouleaux.
|
 |
|
Manostat de freinage
Pour donner à la locomotive, en cours de freinage de service, un effort proportionnel à la dépression dans la conduite générale,
un manostat (figure 61) mesure la pression dans la conduite générale et affiche l'intensité que doit assurer le dispositif de régulation.
|
XI - LA CONDUITE DE LA LOCOMOTIVE

|
Nous avons vu que pour couvrir, en traction, la totalité du plan "effort/vitesse", il convient d'assurer les déblocages successifs
du pont complet, du pont mixte, puis du dispositif de shuntage.
Par une polarisation convenable de chaque déphaseur, on parvient à ce résultat avec une seule grandeur de commande. La figure 62 donne,
dans le cas de la locomotive BB15000, les angles de déblocage des divers ensembles en fonction de la grandeur de commande Uc (de 0 à 25 V).
Il suffirait donc, pour commander la locomotive, d'injecter la tension de commande dans les déphaseurs des divers systèmes à
partir d'un potentiomètre par exemple, commandé par le conducteur.
Une telle commande est assez délicate car elle nécessite une observation attentive des appareils de mesure. La position angulaire
du manipulateur fixe ainsi la tension aux bornes des moteurs, puis leur excitation.
En particulier, lors d'un démarrage, une manoeuvre trop rapide risque d'entraîner
|
|  |
le dépassement de l'intensité maximale
admise par les relais de protection et, par voie de conséquence, l'ouverture du disjoncteur principal.
C'est la raison pour laquelle ce mode de commande n'est utilisé qu'en secours, ou dans le cas où les automatismes de l'engin
sont défaillants. Noter toutefois, qu'une telle commande peut être adoptée avec un servo-moteur qui introduit la "constante de temps"
nécessaire. Cette méthode peut être utilisée dans le cas de locomotives bi-courant qui possèdent déjà un servo-moteur pour la marche
sous courant continu.
Commande par régulateur d'intensité
Pour remédier aux inconvénients de la commande directe, on adopte la commande à régulateur d'intensité.
Par le manipulateur, le conducteur "affiche" à l'entrée d'un régulateur, l'intensité qu'il désire obtenir. Cette affiche est comparée
à la mesure d'intensité et le régulateur élabore la tension de commande qui, appliquée aux déphaseurs, permet d'obtenir l'intensité
affichée.
Il s'agit, ici encore, d'une commande manuelle, mais dans laquelle la position angulaire du manipulateur fixe, quelle que soit la
vitesse, la valeur de l'intensité que doivent absorber les moteurs. La surveillance des appareils de mesure se trouve ainsi notablement
allégée.
Il convient toutefois de noter, que ce mode de commande doit être obligatoirement complété par un dispositif d'antipatinage, car la
marche à intensité affichée ne permet pas de résorber les patinages comme tend à le faire une commande à tension affichée.
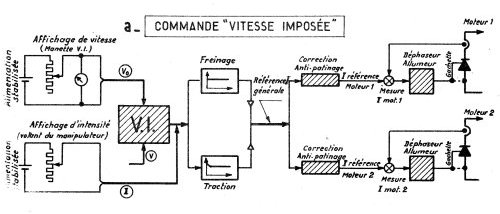
Commande automatique à vitesse imposée
L'utilisation d'un régulateur d'intensité permet de doter la locomotive d'une commande automatique à vitesse imposée. Dans ce dispositif,
l'"affiche" de vitesse, fixée par le conducteur, est comparée à la "mesure" de la vitesse réelle de l'engin, et le dispositif élabore une
grandeur qui représente l'effort qui doit être développé pour atteindre et maintenir la vitesse qui a été fixée. Comme l'effort dépend
de l'intensité, c'est finalement cette grandeur qui est utilisée comme affiche à l'entrée du régulateur d'intensité.
Il faut évidemment limiter cette intensité lors des accélérations, et il est nécessaire de laisser au conducteur la possibilité de
fixer cette limite d'intensité, en particulier, en fonction des conditions d'adhérence.
Selon le sens de l'effort qui doit être exercé (traction ou freinage) le dispositif de vitesse imposée délivre les ordres nécessaires pour
que l'équipement (relais, contacteurs principaux, commutateurs) réalise le schéma nécessaire à la traction ou au freinage.
 |
La figure 63 donne une vue schématique du manipulateur dont dispose le conducteur pour assurer la conduite de la locomotive.
Les trois modes de conduite qui peuvent être utilisés sont les suivants:
a) Conduite à vitesse imposée
Par la manette "vitesse imposée" située à droite du manipulateur, le conducteur affiche la vitesse qu'il désire obtenir. Il lit
cette affiche sur un voltmètre gradué en km/h et disposé sur le pupitre.
Par le volant principal le conducteur affiche la limite d'intensité qu'il souhaite voir respectée. La manette VI et le volant principal sont
munis de freins convenablement réglés pour éviter des déplacement trop brusques.
Dès lors, la locomotive démarre et atteint la vitesse fixée, suivant le processus indiqué précédemment, en respectant la consigne
d'intensité. Si la vitesse tend à dépasser la valeur affichée, les circuits de la locomotive sont aussitôt disposés pour la marche en freinage
à récupération, par les ordres donnés, par le dispositif de vitesse imposée.
Dans ce cas également, la valeur de l'intensité de freinage se trouve limitée par l'affiche "intensité" fixée par le manipulateur (fig.64a).
|
 |
 |
Il convient de noter que dans le cas où le manipulateur est ramené à 0, l'affiche d'intensité est nulle et la locomotive ne peut
développer aucun effort de traction ni de freinage. Cest la marche sur l'erre.
A noter également que, tant en traction qu'en freinage, l'affiche d'intensité, à l'entrée du régulateur d'intensité du moteur qui patine,
est corrigée par le dispositif d'antipatinage, d'une grandeur proportionnelle à l'écart de vitesse des deux moteurs.
b) Conduite manuelle au régulateur d'intensité
Le conducteur dispose alors la manette située à droite du manipulateur : soit sur T s'il désire faire fonctionner la locomotive en traction,
soit sur F s'il désire la faire fonctionner en freinage. Sur ces positions, le dispositif de vitesse imposée se trouve isolé et le conducteur
règle l'effort de la locomotive en affichant, par le volant principal, l'intensité qu'il souhaite obtenir (figure 64b).
| c) Commande directe de secours
En cas d'avarie du régulateur d'intensité, la locomotive peut encore fonctionner avec ses pleines performances, par la commande
directe de secours. Il suffit, à cet effet, de disposer, dans le bloc central, un commutateur sur position "Secours", pour que les
déphaseurs puissent être directement attaqués par la tension délivrée par le potentiomètre entraîné par le volant principal (figure 64c).
Dans ce schéma, tous les automatismes y compris l'antipatinage, sont déconnectés, mais l'isolement de ce dispositif ne peut entraîner
de conséquences fâcheuses car, on l'a déjà vu, dans le cas de la marche secours, la conduite s'effectue à tension constante pour chaque
position du volant du manipulateur.
|
 |

La 15001 en tête d'un train d'essai.
|

La 15002 sortie d'usine.
|
Retour Index 
|


