retour retour
2 - Principes généraux, montages redresseurs et modes de réglages de la tension mis en œuvre sur les locomotives à redresseurs
Nous avons vu comment le redresseur au silicium, se substituant au redresseur à vapeur de mercure, apporte une simplification des
locomotives à redresseurs et une réduction sensible de leur entretien. Mais le principe et les propriétés de la locomotive à redresseurs
n'en sont pas modifiés pour autant.
Nous allons maintenant examiner les schémas de montage des redresseurs, l'allure des tensions et des courants, les méthodes de réglage
de la tension et le comportement du moteur à courant ondulé, toutes choses qui restent valables quel que soit le type de redresseur.
2.1 - Montages redresseurs -
On emploie les deux types courants de montages de redresseurs dits "monophasés" permettant l'utilisation des deux alternances du courant
d'alimentation, qui sont :
- le montage en "push-pull" ou bivalve, schématisé à la figure 21a.
- le montage en pont schématisé à la figure 21b et dont il existe une variante "pont à point milieu" applicable lorsque la
locomotive comporte 2 ou 4 moteurs.
Cette variante apparaît à la figure 27c.

Fig.21a : Montage Push-pull (bi-valve) |
Le choix de l'un ou l'autre de ces montages n'influe ni sur la forme de la tension appliquée au moteur, ni sur celle de l'intensité qui
le traverse.
Les schémas de la figure 21 peuvent laisser croire que le montage en pont demande obligatoirement deux fois plus de redresseurs
que le montage en push-pull. En fait, ceci n'est réel que dans le cas d'un seul moteur alimenté par des redresseurs à vapeur de mercure.
Si deux moteurs doivent être alimentés, il faut, compte tenu des possibilités en intensité des redresseurs, en mettre deux en
parallèle dans chaque bras du push-pull (ou constituer deux push-pull).
On arrive donc au même nombre de redresseurs qu'avec un montage
en pont à point milieu (fig.27c) dont chaque bras n'est dimensionné que pour l'intensité d'un moteur.
|

Fig.21b : Montage en pont |
|
La préférence entre l'un ou l'autre des montages redresseurs est finalement dictée par des considérations de réalisation de
l'ensemble transformateur - redresseurs.
Le montage en pont est le plus avantageux quant au dimensionnement du transformateur. Dans ce cas, en effet, la totalité de
l'enroulement secondaire est utilisé à chaque alternance, tandis qu'avec le montage push-pull, une moitié seulement du secondaire est
utilisé au cours d'une alternance.
|
En contre-partie, il donne lieu à certaines difficultés lorsqu'il s'applique à des redresseurs à vapeur de mercure, du fait
que les cathodes des redresseurs sont à des potentiels différents, contrairement au cas du montage en push-pull qui leur donne
le même potentiel.
Ceci présente deux inconvénients :
- 1° - les circuits d'excitation des redresseurs, qui sont au potentiel de cathode, doivent être isolés entre eux :
d'où complication des circuits auxiliaires.
- 2° - Les ignitrons et les excitrons que nous utilisons sont a cathode non isolée car cette disposition simplifie leur
construction et réduit leur encombrement (et leur prix) : par suite leurs cuves sont au potentiel des cathodes, donc à des potentiels
différents avec le montage en pont. Dans le cas, le plus habituel de la climatisation par eau, il faut alors ménager entre redresseurs
des longueurs suffisantes de tuyauterie en matériaux isolants pour obtenir l'isolement nécessaire : d'où complication
et alourdissement du circuit de climatisation.
Ces inconvénients du montage en pont disparaissent avec l'emploi des redresseurs à semi-conducteurs puisque :
- d'une part les diodes ne comportent pas de dispositif d'excitation,
- d'autre part, elles sont refroidies par air (soit naturellement, soit par ventilation forcée).
Avec l'utilisation de thyristors, ou redresseurs contrôlés, on retrouve les circuits d'excitation ; mais quel que soit le
type de montage choisi, pont ou push-pull, il faut de toute façon prévoir de petits transformateurs d'isolement dans les circuits
des électrodes de commande, puisque la constitution en "chaîne" de l'ensemble redresseur implique des potentiels différents pour
les cathodes des éléments constitutifs.
Finalement, on trouve donc généralement :
- - le montage en push-pull avec redresseurs à vapeur de mercure,
- - le montage en pont avec redresseurs à semi-conducteurs contrôlés
Les exceptions concernent des locomotives existant dans les deux versions (BB 12000 - 16000 - 16500) ou dont 1'étude fut modifiée
par suite des progrès réalisés en matière de redresseurs silicium (BB 30001 et 30002).

BB12000 |

BB16000 |

BB16500 |

BB30001 |
Indirectement, le choix du redresseur influe donc sur le dimensionnement du transformateur. Nous préciserons de quelle quantité
ultérieurement, après avoir indiqué comment se fait le réglage de la tension,
2.2 - Réglage de la tension -
Nous avons signalé déjà que les redresseurs à vapeur de mercure et les thyristors permettent d'obtenir une tension moyenne
variable par réglage de leur angle d'amorçage. On peut également parvenir à ce même résultat avec des diodes
au silicium, en insérant des amplificateurs magnétiques dans les bras du montage redresseur (fig. 22).

Fig.22a |

Fig.22b |
Le réglage de tension assuré par les redresseurs, sur lequel nous reviendrons plus loin,
a été peu employé jusqu'à maintenant (voir tableaux donnés précédemment :
C 20151 à 20159 - Z 6004 - Z 6008) ; c'est cependant, ainsi que nous l'avons dít, la formule d'avenir.

|
La solution classique que nous examinerons d'abord consiste à pratiquer comme sur les locomotives à moteurs monophasés directs,
le réglage de la tension sur le transformateur qui, à cet effet, est muni de prises.
Le changement de prises, bien qu'il puisse s'effectuer aussi par contacteurs, est beaucoup plus couramment réalisé au moyen d'un
sélecteur à gradins, dit graduateur, accolé au transformateur : il en est ainsi,à l'exception d'une seule (BB 20006), sur nos
locomotives a redresseurs (redresseurs non commandés s'entend). Le graduateur, ou éventuellement les contacteurs, insèrent des selfs
ou des résistances entre les prises consécutives au moment du passage, pour éviter le court-circuit de la fraction d'enroulement
comprise entre elles.
La figure 23 montre un transformateur de locomotive BB 16500 doté de son graduateur. Ce dernier est représenté ouvert à la fig. 24;
il s'agit d'un graduateur droit; mais les séries récentes de locomotives monophasées ou bi-courant sont équipées d'un graduateur
circulaire (fig. 25).
La cuve du graduateur, comme celle du transformateur, est remplie d'huile. Le graduateur peut assurer le réglage BT ou le réglage
HT de la tension.
|

Fig.24 : Graduateur droit |
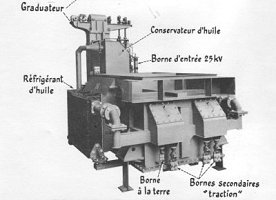
Fig.23 : Vues d'un ensemble transformateur-graduateur |

Graduateur circulaire 25kV |
 |
 |
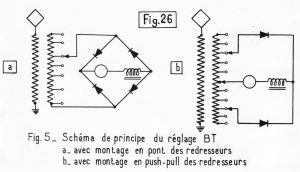
Sur un engin de puissance supérieure à 2000 KW environ,
il est difficile d'employer le réglage BT (fig. 26a car le graduateur doit travailler sur des courants importants (de 2000 A environ
ou davantage). Il est alors préférable d'utiliser le réglage HT que l'on réalise avec un autotransformateur à prises suivi d'un
transformateur à rapport fixe ainsi que le montre la fig. 26b. Il n'est pas possible, en effet, de réaliser le réglage HT avec un
transformateur unique dont on modifierait le nombre de spires en service au primaire, puisque la f.c.e.m. de cet enroulement,
d'expression E1 = n1 Bm S , doit aux chutes près, équilibrer la tension constante de la caténaire.
Pour que le transformateur
travaille à induction maximale constante, il faut donc que le nombre des spires primaires n1 demeure constant. On pourrait évidemment
employer deux transformateurs en cascade, mais l'emploi d'un autotransformateur permet un notable gain de poids, sans affecter
l'isolement des circuits puisque celui-ci reste assuré (sauf pour le graduateur et ses accessoires) par le transformateur situé en aval. , doit aux chutes près, équilibrer la tension constante de la caténaire.
Pour que le transformateur
travaille à induction maximale constante, il faut donc que le nombre des spires primaires n1 demeure constant. On pourrait évidemment
employer deux transformateurs en cascade, mais l'emploi d'un autotransformateur permet un notable gain de poids, sans affecter
l'isolement des circuits puisque celui-ci reste assuré (sauf pour le graduateur et ses accessoires) par le transformateur situé en aval.
|
On peut noter que le réglage BT se prête mal à l'emploi du montage des redresseurs en push-pull : en effet, il oblige à doubler
le système de réglage de la tension, puisque ce réglage doit se faire de part et d'autre du point milieu
du transformateur. Le réglage HT, par contre, s'accommode aussi bien de l'un ou l'autre des montages en push-pull et en pont.
Bien entendu il est possible aussi sur une locomotive à redresseurs de n'emp1oyer qu'un transformateur à rapport fixe et d'assurer
le réglage de la tension aux bornes des moteurs en utilisant un rhéostat et divers couplages comme sur une locomotive à courant continu.
Mais cette solution ne permet pas de bénéficier des exceptionnelles qualités d'adhérence de la locomotive à redresseurs,
apportées par l'alimentation des moteurs à tension pratiquement constante (un rhéostat produit une chute de tension variable avec
la charge). De plus, elle donne lieu, évidemment, à des pertes rhéostatiques au démarrage.
On ne l'emploie que sur les locomotives polycourants destinées à la remorque de trains rapides car :
- elle est la plus légère étant donné qu'elle supprime le graduateur alors que le rhéostat est nécessaire de toute façon , pour le
fonctionnement en courant continu.
- les démarrages de ces locomotives sont rares et de courte durée, et dans ces conditions, les pertes rhéostatiques ne représentent
qu'une très faible part des pertes totales (quelques %)
2.3 - Puissance de dimensionnement des transformateurs en fonction du type de réglage BT ou HT et du montage des
redresseurs
(fig.27)
Chaque enroulement du transformateur est caractérisé par :
- la tension qu'il délivre ou qu'on lui applique, à vide
- le courant efficace qu'il est capable de supporter en permanence.
On définit la puissance de dimensionnement comme le produit de ces deux
grandeurs.
En ce qui concerne l'auto-transformateur, les différentes fractions de l'enroulement ont des intensités de dimensionnement différentes,
car 1'intensité "primaire", qui se retranche de l'intensité “secondaire" considérée constante, varie selon la position du graduateur.
La section des conducteurs des différentes fractions de l*enroulement est déterminée en conséquence et on montre que l'on
peut considérer une intensité de dimensionnement moyenne, égale aux 3/4 seulement de l'intensité secondaire.
En combinant les deux modes de réglage HT et BT avec les deux modes de montage des redresseurs en pont et en push-pull,
on parvient, en appelant P la puissance aux moteurs pour laquelle on calcule le transformateur, aux puissances
Pdim de dimensionnement globales suivantes des transformateurs
| PUISSANCE DE DIMENSIONNEMENT DU TRANSFORMATEUR SELON LE TYPE DE
REGLAGE DE TENSION ET LE TYPE DE MONTAGE DES REDRESSEURS |

Fig.27a : Réglage Basse Tension |

Fig.27b : Réglage Haute Tension |
Pdim = Puissance de dimensionnement du transformateur (total des enroulements)
P = Puissance de définition (qui peut être < Pmoteur)
Ci-contre : Figure 27c : Montages à point milieu. Pour le montage en pont, on a un même dimensionnement du transformateur
que le montage en pont ordinaire |
 |
Notons que la puissance P n'est pas forcément la puissance nominale des moteurs de traction, car une locomotive ne fonctionne
pas en permanence à cette puissance. Aussi peut-on profiter de la constante de temps plus importante du transformateur pour le définir
à une puissance plus faible que celle des moteurs.
On adopte souvent comme intensité de définition du transformateur 80% de l'intensité de définition des moteurs.
Le graduateur circulaire (fig. 25) que nous employons sur nos locomotives récentes assure le réglage HT sur 25 kV, c'est-à-dire
sur la totalité de l'enroulement autotransformateur (seules quelques spires de protection sont maintenues en tête du graduateur au
cran le plus élevé). On aboutit alors en réglage HT, aux puissances de dimensionnements données plus haut.
Par contre, le graduateur droit (fig. 24), largement utilisé auparavant, n'effectuait le réglage de tension que sur 15 kV,
c'est-à-dire seulement sur les 3/5 de l'enroulement autotransformateur. Ceci parce que nous avions utilisé un
matériel existant, déjà employé par certains réseaux européens électrifiés en 15 kV - 16 2/3 Hz. Cette disposition entraîne un
sur-dimensionnement de 1'autotransformateur, puisque dans 2/5 de cet enroulement ne se fait jamais la soustraction des courants
"secondaire" et "primaire". On aboutit alors aux puissances de dimensionnement suivantes :
- - Réglage HT 15 kV et montage en pont: : P'4 = 4,25 P
- - Réglage HT 15 kV et montage en push-pull : P'3 = 4,82 P
En considérant que les masses de transformateurs dans les différentes
formules sont sensiblement dans le même rapport que les puissances 3/4 des puissances de dimensionnement :
 (4)
on parvient su tableau suivant : (4)
on parvient su tableau suivant :
| Type de réglage |
Montage des redresseurs |
Puissance de dimensionnement |
Masse |
| Réglage BT |
- Pont
- Push-pull |
2,70 P
3,27 P |
M
1,15M |
Réglage HT
sur 25kV |
- Pont
- Push-pull |
3,71 P
4,28 P |
1,27M
1,41M |
Réglage HT
sur 15kV |
- Pont
- Push-pull |
4,25 P
4,82 P |
1,41M
1,54M |
En ce qui concerne les valeurs relatives des masses, le tableau n'est valable, évidemment, qu'à la condition de considérer des
transformateurs de même conception technique, tant en ce qui concerne la disposition du circuit magnétique que celle des bobinages.
On peut remarquer que le réglage HT 25 kV avec montage en push-pull et le réglage HT 15 kV avec montage en pont conduisent pratiquement
au même dimensionnement du transformateur. C'est-à-dire que le fait de ne regler que sur les 3/5 de l'enroulement autotransformateur
annule le gain apporté par le montage en pont.
2.4 - Forme des tensions et courants
Sur les locomotives à redresseurs (à l'exception d'une réalisation étrangère l'automotrice du TEE 'Cisalpin") une self de lissage
est montée en série avec chaque moteur.
Grâce à la présence de cette self, et en partie aussi à cause de l'inductance propre des moteurs, le courant qui les traverse est
un courant ondulé, c'est-à-dire pseudo-continu, bien qu'il soit obtenu à partir d'une tension en forme de demi-onde sinusoïdale (Fig.28).
Plus exactement, la forme de tension redressée est celle d'une demi-sinusoîde entamée d'une plage d'ordonnée nulle due à la
commutation des redresseurs.
Nous employons le terme "tension redressée", d'usage courant d'ailleurs, pour désigner la tension en aval des redresseurs, car
c'est une dénomination commode, bien qu'incorrecte. C'est en effet le courant et non la tension qui est redressée. En l'absence
de courant, il n'y a aucune tension en aval des redresseurs (considérés parfaits).

Fig.28b à d |
 |

Fig.28e à g |
| En effet, à cause de l'inductance du circuit anodique, essentiellement constituée par l'inductance de
fuite du transformateur, la disparition comme 1'établissement du courant dans un redresseur ne se font pas instantanément au passage
par 0 de la tension anodique.
Au début de chaque alternance de la tension du transformateur, le transfert du courant d'un redresseur sur
1'autre se fait progressivement (fig. 28c). Pendant ce phénomène de commutation, ou empiétement, les redresseurs débitent simultanément,
ce qui met au même potentiel les bornes secondaires A et B (fig. 28a) du transformateur.
Par conséquent, la tension secondaire totale UAB s'annule et donc aussi forcément chacune des tensions secondaires UA0 et UB0,
puisque UA0 = UB0 = UAB/2,
|
d'où la plage d'ordonnée nulle de la tension redressée pendant la commutation
fig. 28 d).
Le tension redressée peut être décomposée par développement en série de Fourier en une tension continue et des tensions alternatives
dont les fréquences sont des multiples pairs de la fréquence d'alimentation : c'est-à-dire 100 Hz, 200 Hz, 300 Hz, etc.
(pour la fréquence d'alimentation de 50 Hz). On peut considérer que chacune de ces tensions, appliquée au circuit moteur - self de lissage,
y engendre la circulation d'un courant de même fréquence. Mais les courants de fréquence supérieure à 100 Hz sont pratiquement
négligeables en raison surtout de l'imp6dance présentée par la self de lissage.
(Inductance des selfs de lissage : de l'ordre de 4 à 7mH au régime continu des moteurs, compte tenu de la saturation apportée par la
composante continue du courant. Il s'agit de selfs employées en traction à 50 Hz)
On peut donc finalement considérer le courant dans le circuit de traction ("circuit continu") comme la somme :
- d'un courant continu
- d'un courant à 100 Hz (pour la fréquence (d'alimentation de 50 Hz) ce qui donne finalement un courant ondulé (fig. 28e).
Trop importante la composante à 100 Hz serait gênante parce qu'elle rendrait difficile la commutation des moteurs et y produirait
des pertes supplémentaires inadmissibles (majoration des pertes joule et des pertes fer) sans pour autant y produire un couple
appréciable. Nous verrons en effet que le flux des moteurs est presque continu, soit naturellement, soit parce qu'on prend des
dispositions propres à le rendre tel. Or il n'y a qu'avec une composante alternative  100 du flux, que I100 puisse donner un couple
100 I100 utile. Le produit 100 est nul en
valeur moyenne;
le seul effet de I100 est de rendre pulsatoire le couple du moteur.
100 du flux, que I100 puisse donner un couple
100 I100 utile. Le produit 100 est nul en
valeur moyenne;
le seul effet de I100 est de rendre pulsatoire le couple du moteur.
Aussi détermine-t-on la self de lissage de façon que le taux d'ondulation du courant (fig. 28c) soit d'environ 20 à 30% au régime
continu des moteurs.
On a retenu cet ordre de grandeur, car il conduit à des bilans de poids et de prix satisfaisants pour l'ensemble de la locomotive.
Les moteurs supportent bien ces taux d'ondulation et les selfs sont d'un encombrement et d'un poids raisonnables (poids compris entre
le 1/10 et le 1/6 de celui du moteur, couramment voisine 1/8).
De la forme du courant ondulé se déduit celle du courant par redresseur, chaque redresseur ne conduisant que pendant une des deux
alternances (fig.28f).
Avec un montage push-pull, le courant dans l'un des redresseurs est aussi le courant dans le demi-secondaire correspondant
(OA ou OB sur la fig.28a). Bien entendu, les sens des courants sont inverses pour l'un et l'autre des demi-secondaires, et leur
somme donne, en tenant compte du rapport de transformation, le courant primaire (fig. 28g).
Avec un montage en pont, le courant secondaire a la même forme que le courant primaire puisque le secondaire est utilisé en
totalité à chaque alternance.
En ce qui concerne les tensions, on retrouve :
- la composante continue de tension redressée aux bornes des moteurs, où elle est équilibrée par la f.e.m. de ces derniers,
continue, comme le flux (voir plus haut),
- la composante alternative totale aux bornes de la self de lissage, car presque toute la réactance du circuit est contenue dans la self.
Toutes ces considérations ne sont pas purement théoriques mais en concordance avec les enregistrements oscillographiques.
La fig. 29 reproduit des enregistrements oscillographiques, effectués en ligne sur une locomotive à redresseurs ignitrons montés en
push-pull (BB 12002 - Essais de 1954 sur VALENCIENNES-MOHON). On peut remarquer une légère déformation de 1a tension primaire,
déformation que l'on retrouve sur la tension aux bornes de la self de lissage. Elle est due aux harmoniques de courant qui engendrent
des harmoniques
de tension de la ligne d'alimentation.
C'est également à la présence d'harmoniques qu'est dû le renflement du trait au sommet et à la base des diverses courbes.
En augmentant la vitesse de balayage, on peut faire apparaître une dentelure très resserrée.
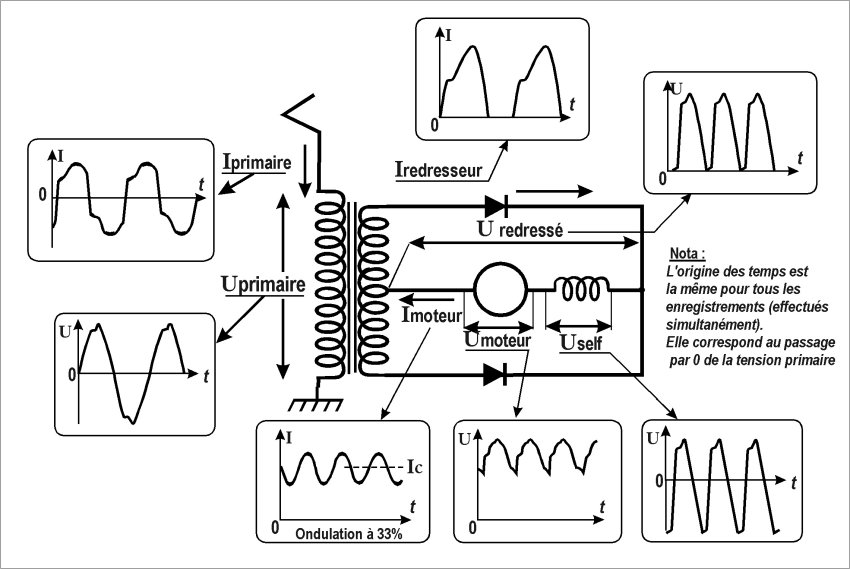
RELEVES OSILLOGRAPHIQUE DES TENSIONS ET COURANTS EN DIVERS POINTS DU CIRCUIT DE TRACTION
2.5 - Formules
Sans entrer dans le détail du calcul, nous donnerons les relations exprimant l'angle de commutation, la chute de tension
due à la commutation, et la valeur moyenne de la tension redressée.
2.5.1. - Angle de commutation -
Il est défini par son cosinus :
 relation dans laquelle :
relation dans laquelle :
- X'1 est la réactance du transformateur ou du primaire et x%, la réactance exprimée en % (pour la valeur nominale du courant)
- m est le rapport de transformation U1/U'2
- n le nombre de moteurs en parallèle
- Imot l'intensité par moteur
- Itr nominale l'intensité nominale du transformateur ( ramenée à 1 moteur et généralement définie à 80% seulement de l'intensité
nominale du moteur ( pour profiter des constantes de temps thermiques différentes des deux appareils)
La commutation dure d'autant plus longtemps que la réactance du transformateur et le courant sont importants, et d'autant moins que
la tension est élevée ce qui se conçoit, puisque ce qui provoque l'extinction de l'un des redresseurs est l'apparition de la tension
sur l'autre.
2.5.2 - Chute de tension de commutation -
Puisque la commutation entame la demi-onde de tension redressée, elle réduit la valeur moyenne de cette tension d'une quantité :
 On voit que la chute inductive engendrée dans le transformateur est équivalente en aval des redresseurs à une chute ohmique.
On obtiendrait la même chute de tension avec l'insertion dans le circuit de chaque moteur d'une résistance de valeur x:
On voit que la chute inductive engendrée dans le transformateur est équivalente en aval des redresseurs à une chute ohmique.
On obtiendrait la même chute de tension avec l'insertion dans le circuit de chaque moteur d'une résistance de valeur x:
 2.5.3 - Valeur moyenne de la tension redressée -
2.5.3 - Valeur moyenne de la tension redressée -
C'est par définition :
 Ce qui donne : Ce qui donne :
 Finalement :
Finalement :
 formule dans laquelle apparaît la chute due à la commutation
2.5.4 - Tension aux bornes des moteurs -
formule dans laquelle apparaît la chute due à la commutation
2.5.4 - Tension aux bornes des moteurs -
Pour l'obtenir, il faut retrancher de la précédente relation, les chutes ohmiques et la chute dans les redresseurs, d'où :
 avec :
avec :
- a = chute de tension dans les redresseurs
- R'2 = résistance du transformateur ramenée au secondaire
- Rs = résistance de la self de lissage en série avec chaque moteur
2.5.5 - Facteur de puissance -
| |
La puissance apparente au primaire du transformateur est : |
 |
| |
tandis que la puissance active est sensiblement : |
 |
| |
d'où le facteur de puissance : |
 |
Valeur approchée légèrement pessimiste par rapport aux résultats des mesures. Soit encore :
 Pour une locomotive à réglage HT, cette relation se traduit en fonction du rapport:
Pour une locomotive à réglage HT, cette relation se traduit en fonction du rapport:
 par les courbes C1 des fig. 30 a et 30 b (en régime continu des moteurs).
par les courbes C1 des fig. 30 a et 30 b (en régime continu des moteurs).
 |
Fig.30a : Facteur de puissance en fonction de la
tension redressée |
Fig.30b : Facteur de puissance en fonction de la
vitesse |
| |
- Réglage HT : courbes C1 et C'1
- Réglage d'angle à commande symétrique : droites D2 et D'2
- Réglage d'angle à commande asymétrique : courbes C3 et C'3
|
|
|
|
Aux vitesses usuelles de la locomotive, le facteur de puissance reste voisin de 0,80. Il s'abaisse aux faibles vitesses,
c'est-à-dire sur les crans bas car la réactance du transformateur, ou ce qui revient au même la tension de court-circuit exprimée
en %, devient importante (fig. 31 ci-contre).
Cette particularité est apportée par 1'auto-transformateur.
Pour une locomotive à réglage sur la BT, le facteur de puissance est plus constant, car la réactance du transformateur varie peu
avec les crans. |
 |
2.6 - Remarques sur la solution à moteur sans self de lissage -
Nous avons vu le cas habituel où chaque moteur, dit "à courant ondulé" est en série avec une self de lissage destinée à réduire
l'ondulation du courant, afin que le fonctionnement du moteur soit aussi proche que possible de celui d'un moteur à courant continu :
le moteur ainsi alimenté est dit à "courant ondulé".
|
Mais nous avions indiqué aussi (au début du paragraphe 2.4) que l'on peut encore envisager l'emploi de moteurs fonctionnant sans
selfs de lissage et dits "à tension ondulée" et que les rames TEE Cisalpin (RAe 1051 a 1054), de conception Suisse, sont équipées
de moteurs de ce type.
Dans ce cas, on trouve une grande part de la composante continue de la tension aux bornes de l'induit et une grande part de la
composante alternative aux bornes de l'inducteur. Mais il est évident qu'alors les caractéristiques constructives du moteur
s'écartent de celles d'un moteur classique à courant continu :
- son inductance propre doit être assez élevée pour jouer en partie le rôle de la self (ce qui implique un moteur peu saturé,
à grand entrefer, et interdit 1'emp1oi du shuntage) |
 |
- sa carcasse doit être totalement ou tout au moins largement feuilletée pour que les pertes restent acceptables malgré la forte
ondulation du flux.
Le couple dû aux composantes alternatives du courant et du flux n'est plus négligeable et le couple total est fortement pulsé.
2.7 - Réglage de tension par variation de l'angle d'amorçage des redresseurs -
2.7.1 - Généralités -
Les systèmes à réglage d'angle permettent une variation continue de la tension, caractéristique favorable à la bonne utilisation
de l'adhérence.
Pourtant, comme nous l'avons déjà dit, ils n'avaient guère été employés jusqu'à maintenant car on leur reprochait :
- d'imposer aux redresseurs des contraintes plus élevées que le réglage d'amp1itude;
- et surtout de conduire à un facteur de puissance plus faible, et à des harmoniques de plus grande amplitude.
Mais, si l'on fait appel aux redresseurs contrôlés, c'est-à-dire aux thyristors, on peut facilement remédier au premier inconvénient,
en adoptant un nombre suffisant de cellules en série, (ce qui ne saurait être envisagé avec des redresseurs à vapeur de mercure).
Quant au défaut d'un facteur de puissance plus faible, s'il subsiste, il faut en contrepartie considérer le gain de masse obtenu par
la suppression de tout appareil "mécanique" de réglage de tension, de masse importante en regard de celle des redresseurs.
D'ailleurs, les thyristors se prêtent bien à la réalisation de dispositifs statiques à réglage mixte (sur l'amplitude de la tension
et sur la valeur de 1'angle d'amorçage) donnant un facteur de puissance intermédiaire entre celui obtenu avec l'un ou l'autre des types
de réglage utilisé seul.
On peut toutefois préférer la simplicité du schéma (et de surtout l'équipement) au relèvement du facteur de puissance.
Il faut tenir compte, maintenant, de deux propriétés qui prennent une importance accrue dans le cadre de l'évolution et des tendances
dans la conception des locomotives, liées à celle du chemin de fer en général :
- l'adoption de thyristors va dans le sens d'un équipement totalement statique, conduisait au maximum de flexibilité et au minimum
d'entretien.
- le réglage de tension étant continu, avec en plus un temps de réponse de l'ordre de la période, il se prête particulièrement
bien à l'automatisation des locomotives.
Nous avons dit que 1'emploi d'amplificateurs magnétiques associés à des diodes (revoir fig. 22 a) permettait également le réglage
continu de la tension.
C'est une solution extrêmement robuste; elle est malheureusement pénalisée par sa masse (environ 1 ,4 fois celle d'un dispositif
classique à réglage BT), ce qui ne permet pas de l'envisager pour une locomotive. Nous ne l'avons employé que sur des automotrices
( Z 6004 et Z 6008) où elle est d'ailleurs doublée par un équipement à thyristors, aux fins de comparaison des deux systèmes.
Bien que les amplificateurs magnétiques aient donné toute satisfaction, on peut dire que cette solution est maintenant
dépassée compte tenu de sa masse et de la fiabilité que l'on peut attendre des thyristors.
2-7-2 - Choix du type de montage et forme des tensions et courants -
Ces deux questions ne peuvent être dissociées car, contrairement au cas où l'on emploie des redresseurs ordinaires fonctionnant
en commutation naturelle, la forme de la tension dépend. du genre de montage adopté. Deux cas sont à
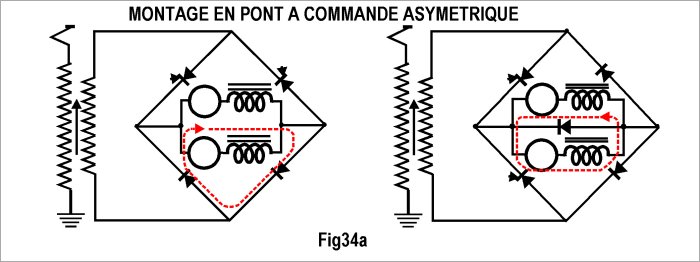
considérer : on peut réaliser un dispositif à commande symétrique ou à commande asymétrique :
- A la commande symétrique appartiennent le montage en push-pull et le montage en pont à redresseurs contrôlé
dans les 4 bras (fig. 33 a et b).
- la commando asymétrique est réalisée avec le montage en pont à redresseurs contrôlés dans deux bras seulement (fig. 32 b).
(Quand nous employons le terme "redresseur contrôlé" pour simplifier l'exposé, il peut, bien entendu, s'agir tout pareillement
d'un redresseur ordinaire en série avec un amplificateur magnétique).
Les propriétés différentes de 1'un et l'autre des types de commande résultent de ce que le débit a lieu dans un circuit à coefficient
de self-induction élevé. Aussi à la fin de chaque alternance, le courant se trouve-t-il prolongé à travers la diagonale moteur-self de
lissage. Mais ce courant de suite se boucle différemment suivant le montage adopté :
- si la commande est asymétrique :
le bouclage du courant de suite se fait obligatoirement à travers les redresseurs qui
déjà conduisaient et le secondaire du transformateur (fig. 33 a et b). Aucun autre chemin ne lui est offert
puisque les autres redresseurs ne sont pas encore amorcés. Ceux qui conduisaient ne peuvent donc se bloquer et la tension
dite "redressée" suit la tension du transformateur. Elle présente donc une pointe négative qui se prolonge jusqu'à l'amorçage
des autres redresseurs et le courant secondaire est ininterrompu (fig. 33 e). La tension moyenne est nulle pour
 voisin de 90° (la valeur exacte dépend de l'angle de commutation u).
Ie réglage de se fait donc de 90° à 0 dans le sens des tensions croissantes.
(0n peut utiliser comme “valeur d'approche" des valeurs de comprises entre 180° et 0° :
On obtient alors un faible couple moteur produit par un courant discontinu).
- si la commande est asymétrique, le bouclage du courant de suite se fait sans passer par le transformateur, puisqu'il peut se
refermer : voisin de 90° (la valeur exacte dépend de l'angle de commutation u).
Ie réglage de se fait donc de 90° à 0 dans le sens des tensions croissantes.
(0n peut utiliser comme “valeur d'approche" des valeurs de comprises entre 180° et 0° :
On obtient alors un faible couple moteur produit par un courant discontinu).
- si la commande est asymétrique, le bouclage du courant de suite se fait sans passer par le transformateur, puisqu'il peut se
refermer :
- - soit à travers les deux bras "libres" (bras constitués de diodes)
- - soit à travers les diodes de décharge dites aussi "diodes de roue libre".
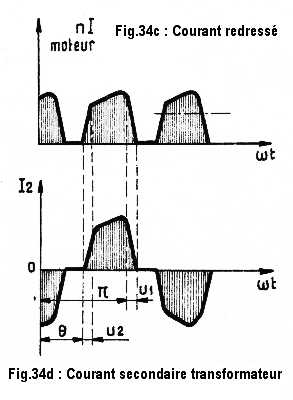
Les extrémités de la diagonale moteur - self de lissage se trouvant pratiquement en court-circuit, la tension redressée s'annule.
Les redresseurs commandés peuvent s'éteindre et le courant secondaire s'interrompt (fig. 34 d).
La tension moyenne est nulle, cette fois, pour = 180°.
Le réglage de se fait donc de 180° à 0 dans le sens des tensions croissantes.
Un montage push-pull auquel on ajouterait un redresseur non contrôlé pour assurer le bouclage du courant hors du transformateur
(anode au point milieu du transformateur - cathode réunie à celles des redresseurs contrôlés) aurait les mêmes propriétés.
Des deux montages à commande symétrique et asymétrique, c'est le second qui est le plus avantageux quant au facteur de puissance
obtenu, nous le verrons plus loin.
Dans l'une ou l'autre des deux dispositions qui sont représentées à la fig. 34,
le montage à commande asymétrique est également
le plus favorable à la bonne tenue des redresseurs contrôlés pour deux raisons :
2.7.3.1 - Montages à commande symétrique - (fig33)
a) l'angle de commutation u dépend de l'angle de blocage qui,
rappelons-le, varie de 90° à 0 dans le sens des tensions croissantes. La commutation est d'autant plus rapide que
est proche de 90°, ce qui est normal puisque 1'écart des tensions anodiques est alors maximum. C'est 1'équivalent de ce que nous
avions vu en commutation naturelle quant à l'influence de l'amplitude de la tension.

b) La chute de tension due à la commutation s'exprime, comme en commutation naturelle, par :

c) La tension moyenne redressée, fonction de , a pour valeur :


d) aux bornes des moteurs on trouve donc :
e) et le facteur de puissance s'exprime par :

On parvient donc à un résultat fondamentalement différent de celui obtenu avec le réglage de 1'amplitude de la tension.
En effet, dans le cas du réglage d'amplitude (formule 5), le terme variable était le second, puisque x % variait avec les crans et
il n'était important, en réglage HT, que sur les crans bas. Le terme constant 0,9 restait donc prépondérant aux vitesses moyennes et élevées.
Ici, au contraire, avec le réglage d'angle, le second terme est constant puisque le transformateur est à rapport fixe (et que l'on
raisonne à intensité constante); mais le premier terme est proportionnel à cos. Le facteur
de puissance varie donc linéairement avec cos , qui est aussi le rapport :

(Voir figure 31a et b, droites D2 et D'2)
2.7.3.2 - Montage à commande asymétrique (fig.34) -
a) angles de commutation : au cours d'une demi-période de la tension alternative, ce montage fait intervenir deux commutations
successives entre redresseurs pris deux à deux (fig.36) Les angles correspondants u1 et u2 satisfont aux relations :
 |
 |
 b) Chute de tension de commutation (elle correspond à l'angle u2 fig 36e)
b) Chute de tension de commutation (elle correspond à l'angle u2 fig 36e)
 c) Tension moyenne redressée :
c) Tension moyenne redressée :

 d) d'où la tension aux bornes des moteurs :
d) d'où la tension aux bornes des moteurs :
 e) Le facteur de puissance a pour expression:
e) Le facteur de puissance a pour expression:

|

|
En pratique, on obtient les courbes C3 et C'3 de la figure 31.
2.8 - Réglage de tension mixte : variation d''amplitude et variation d'angle -
Plusîeurs dispositions peuvent être envisagées, mais nous ne donnerons ici à titre d'exemple que la solution entièrement statique
réalisée sur l'automotrice Z 6008.
Le schéma en est donné à la fig. 38a. La montée en tension se fait en débloquant progressivement les redresseurs du pont 1,
jusqu'au
déblocage total ( = 0), puis ceux du pont 2 et ainsi de suite.
Dans les ponts qui sont encore bloqués ou dans celui qui est en cours de déblocage, le courant passe, pendant tout ou partie du temps,
par les redresseurs qui ne sont pas contrôlés.
|
Comme le confirment les enregistrements oscillographiques, les tensions délivrées par les différents ponts s'ajoutent ainsi qu'i1 est
représenté à la fig. 38b.
étant donné qu'avec cette disposition, le réglage d'angle n'intéresse plus qu'une fraction de la tension totale, on conçoit que le
facteur de puissance en soit amélioré : et, comme pour les tensions Umax/4, Umax/2, 3Umax/4 et Umax, l'angle d'amorçage
est nul, le facteur de puissance prend 4 fois, au cours du réglage, la valeur qu'il aurait
avec un réglage classique sur la BT. Il se représente donc, en fonction de la tension redressée ou de la vitesse, par une courbe en dents
de scie (fig. 39) qui chevauche le courbe obtenue avec un réglage HT. La courbe en dents de scie peut même se situer plus haut que ne le
représente la Figure.
Avec une disposition bien choisie des enroulements secondaires, la réactance étant la même pour chacun d'eux, les pointes de la dent de scie
peuvent toutes se situer autour de 0,8.
Le réglage d'angle effectué sur 4 ponts procure donc un facteur de puissance moyen au moins équivalent à celui que 1'on obtient en
réglage HT, ce qu'ont vérifié les mesures effectuées sur la Z 6008.
|
 |
 |
 |
Fig.39 : Facteur de puissance en fonction de la tension redressée et de la vitesse avec réglage à 4 ponts (courbes approximatives)
(C3 est la courbe relative au réglage asymétrique avec un seul pont, et C1, la courbe relative au réglage HT par prises) |
Photos rajoutées
BB12000 et BB30001 issue du site http://uxtobirza.free.fr/
BB16000 issue du site http://pmeunier23.free.fr/
BB16500 issue du site http://romilly-trains.over-blog.com/
Cisalpin : Wikipedia.
|